机 器 人 机 床 上下料应用案例 随着装备制造技术的发展,特别在机床加工行业,技术飞速进步,人力成本和自动化程度的提高
为了最大限度的解放劳动力,提高生产效率和产品质量,使用搬运机器人代替人工,实现高效、高品质、柔性的完成机器人对机床的上下料
自动化要求设计 1、采用一台机器人、多个工位、配置机器人辅助夹具外加上下料装置以满足客户自动化的生产要求
2、工作站相对独立,并通过生产线匹配的电、气、水路接口联系多个工作站进行生产
3、工作站系统简洁实用,便于操作,易于维护,具有安全防护功能
4、设计为标准爪式夹具,刚性定位强,装卸件方便
5、机器人外围关键设备采用航插连接,安装、运输、维护都方便
6、搬运前后合格件、废件在工作站内部不做检验,保证搬运品质的稳定性、加快生产效率,提高产量
7、具体的工艺和工件规格参考本文以下内容
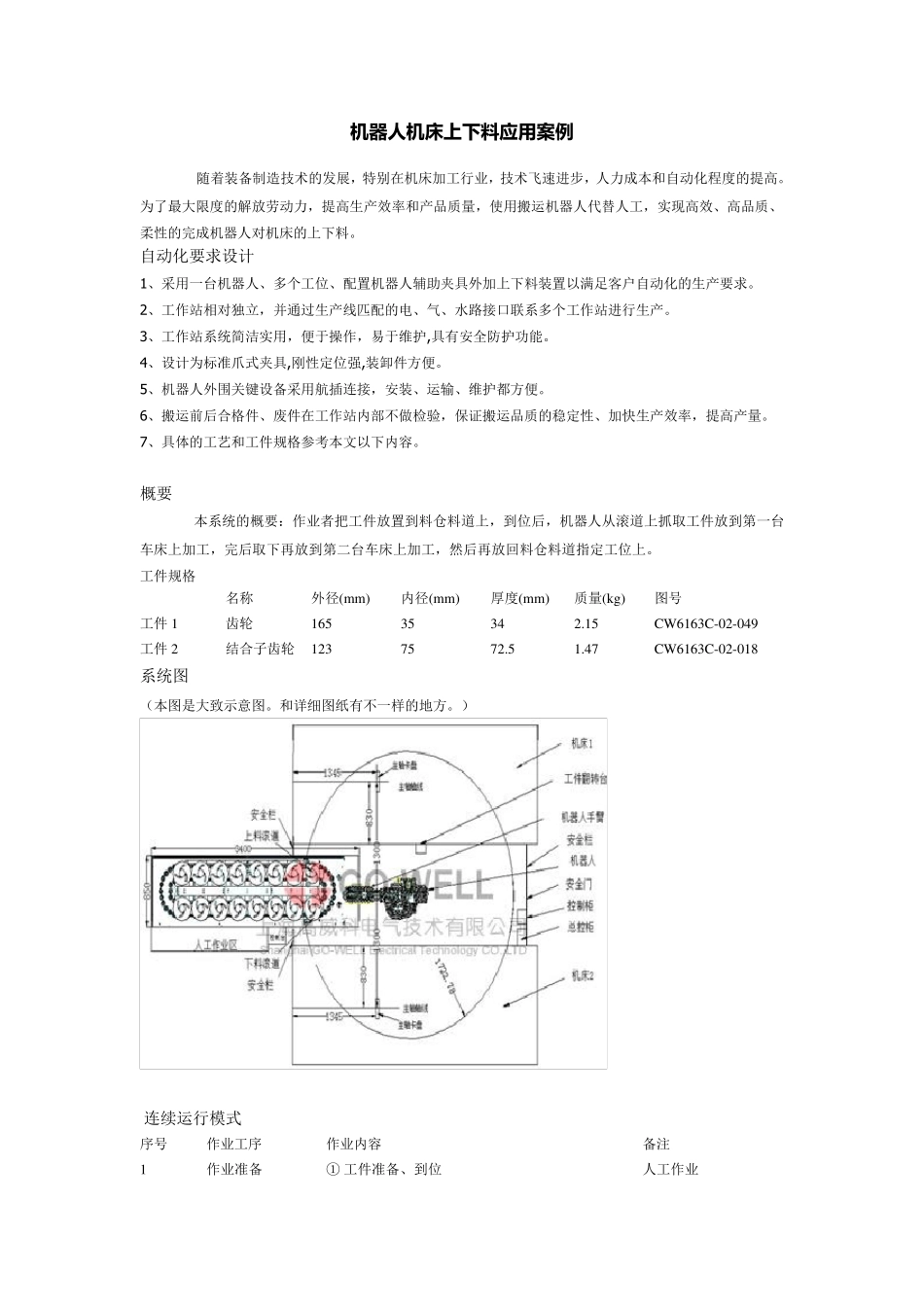
概要 本系统的概要:作业者把工件放置到料仓料道上,到位后,机器人从滚道上抓取工件放到第一台车床上加工,完后取下再放到第二台车床上加工,然后再放回料仓料道指定工位上
工件规格 名称 外径(m m ) 内径(m m ) 厚度(m m ) 质量(kg) 图号 工件1 齿轮 165 35 34 2
15 CW6163C-02-049 工件2 结合子齿轮 123 75 72
47 CW6163C-02-018 系统图 (本图是大致示意图
和详细图纸有不一样的地方
) 连续运行模式 序号 作业工序 作业内容 备注 1 作业准备 ① 工件准备、到位 人工作业 系统启动 ②工件类型、数量设定、颜色区分 ③ 按启动按钮 2 机器人启动 工件从上料台取出 ①工件取出 ②等待机床信号、交换工作 上下料滚道 16 工位,自动换位、升降(详见1
4) 3 机床 1 上下料 机床 1 有工件,下料、吹气清理、上料 机床 1 无工件,吹起清理,上料 作业