1 课程考试复习题及参考答案 一、名词解释题: 1
自由度: 2
机器人工作载荷: 3
柔性手: 4
制动器失效抱闸: 5
机器人运动学: 6
机器人动力学: 7
虚功原理: 8
PWM驱动: 9
电机无自转: 10
直流伺服电机的调节特性: 11
直流伺服电机的调速精度: 12
PID控制: 13
压电元件: 14
图像锐化: 15
隶属函数: 16
BP网络: 17
脱机编程: 18
AUV: 二、简答题: 1
机器人学主要包含哪些研究内容
机器人常用的机身和臂部的配置型式有哪些
拉格朗日运动方程式的一般表示形式与各变量含义
机器人控制系统的基本单元有哪些
直流电机的额定值有哪些
常见的机器人外部传感器有哪些
简述脉冲回波式超声波传感器的工作原理
机器人视觉的硬件系统由哪些部分组成
为什么要做图像的预处理
机器视觉常用的预处理步骤有哪些
请简述模糊控制器的组成及各组成部分的用途
从描述操作命令的角度看,机器人编程语言可分为哪几类
仿人机器人的关键技术有哪些
三、论述题: 1
试论述机器人技术的发展趋势
试论述精度、重复精度与分辨率之间的关系
试论述轮式行走机构和足式行走机构的特点和各自适用的场合
试论述机器人静力学、动力学、运动学的关系
机器人单关节伺服控制中,位置反馈增益和速度反馈增益是如何确定的
试论述工业机器人的应用准则
四、计算题:(需写出计算步骤,无计算步骤不能得分): 1
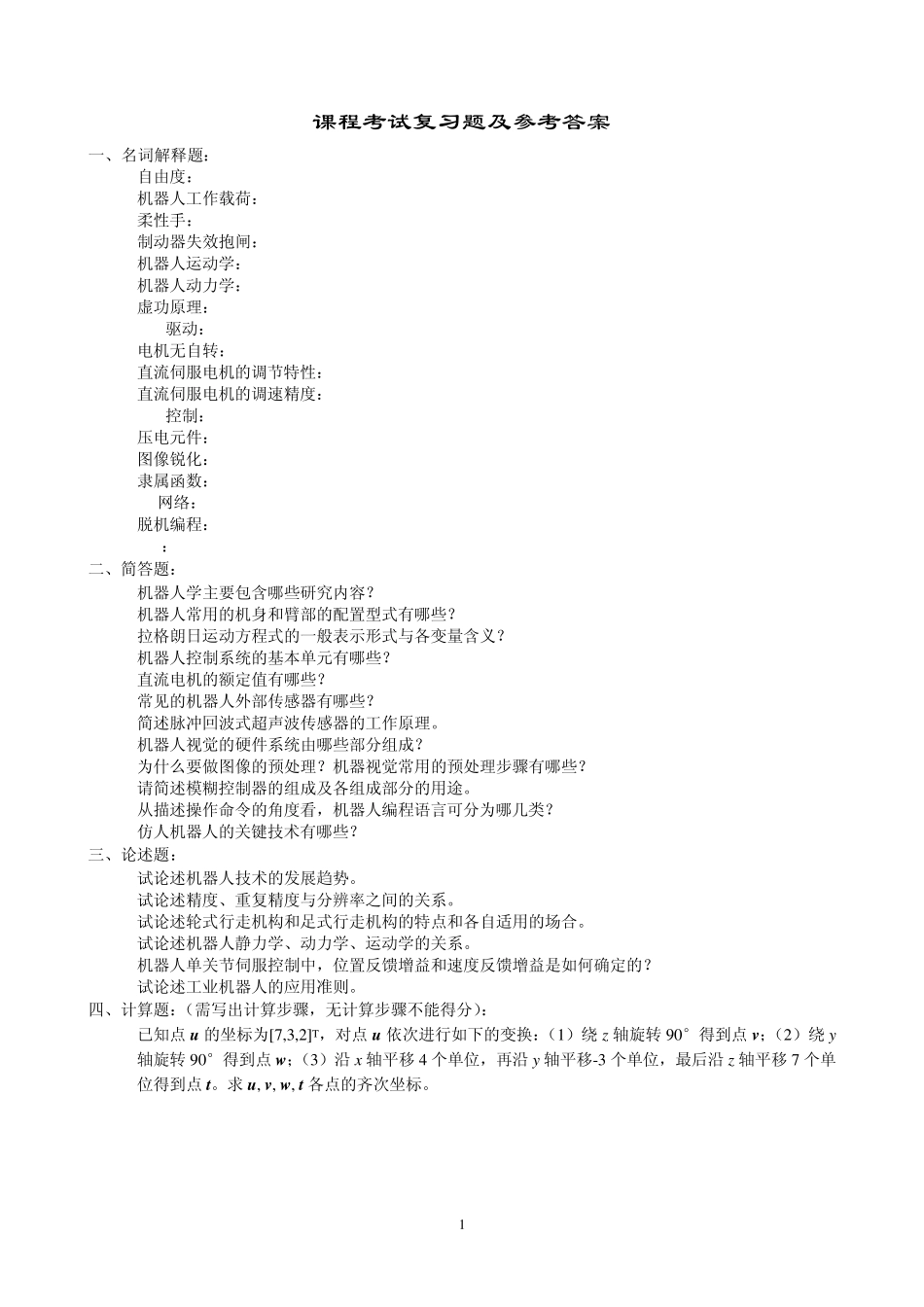
已知点u 的坐标为[7,3,2]T,对点u 依次进行如下的变换:(1)绕z 轴旋转 90°得到点v;(2)绕y轴旋转 90°得到点w ;(3)沿 x 轴平移 4 个单位,再沿 y 轴平移-3 个单位,最后沿 z 轴平移 7 个单位得到点t
求 u, v, w , t 各点的齐次坐标