1 机 械 原 理 部 分 课 后 答 案 第一章 结构分析作业 1
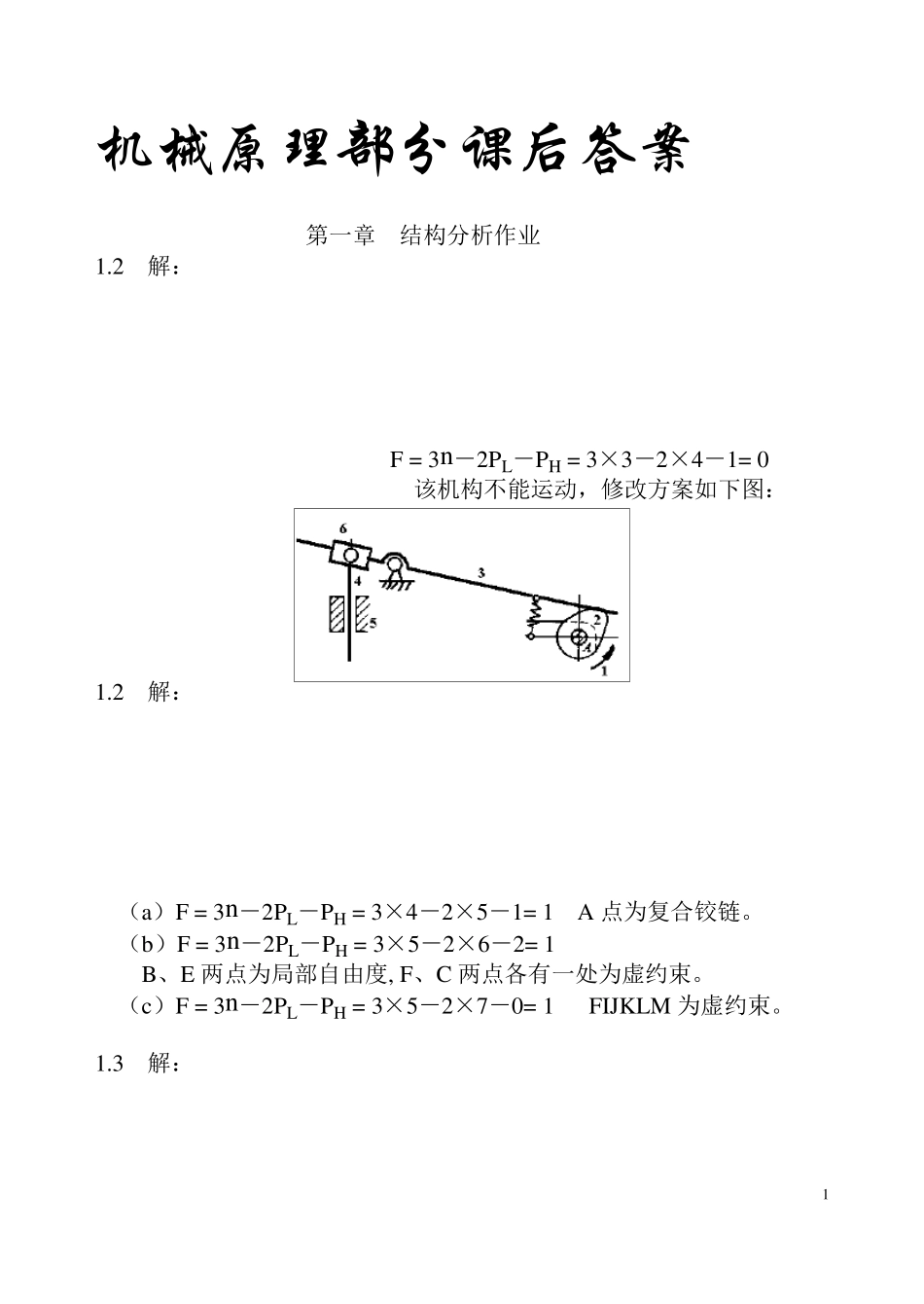
2 解: F = 3n-2PL-PH = 3×3-2×4-1= 0 该机构不能运动,修改方案如下图: 1
2 解: (a)F = 3n-2PL-PH = 3×4-2×5-1= 1 A 点为复合铰链
(b)F = 3n-2PL-PH = 3×5-2×6-2= 1 B、E 两点为局部自由度, F、C 两点各有一处为虚约束
(c)F = 3n-2PL-PH = 3×5-2×7-0= 1 FIJKLM 为虚约束
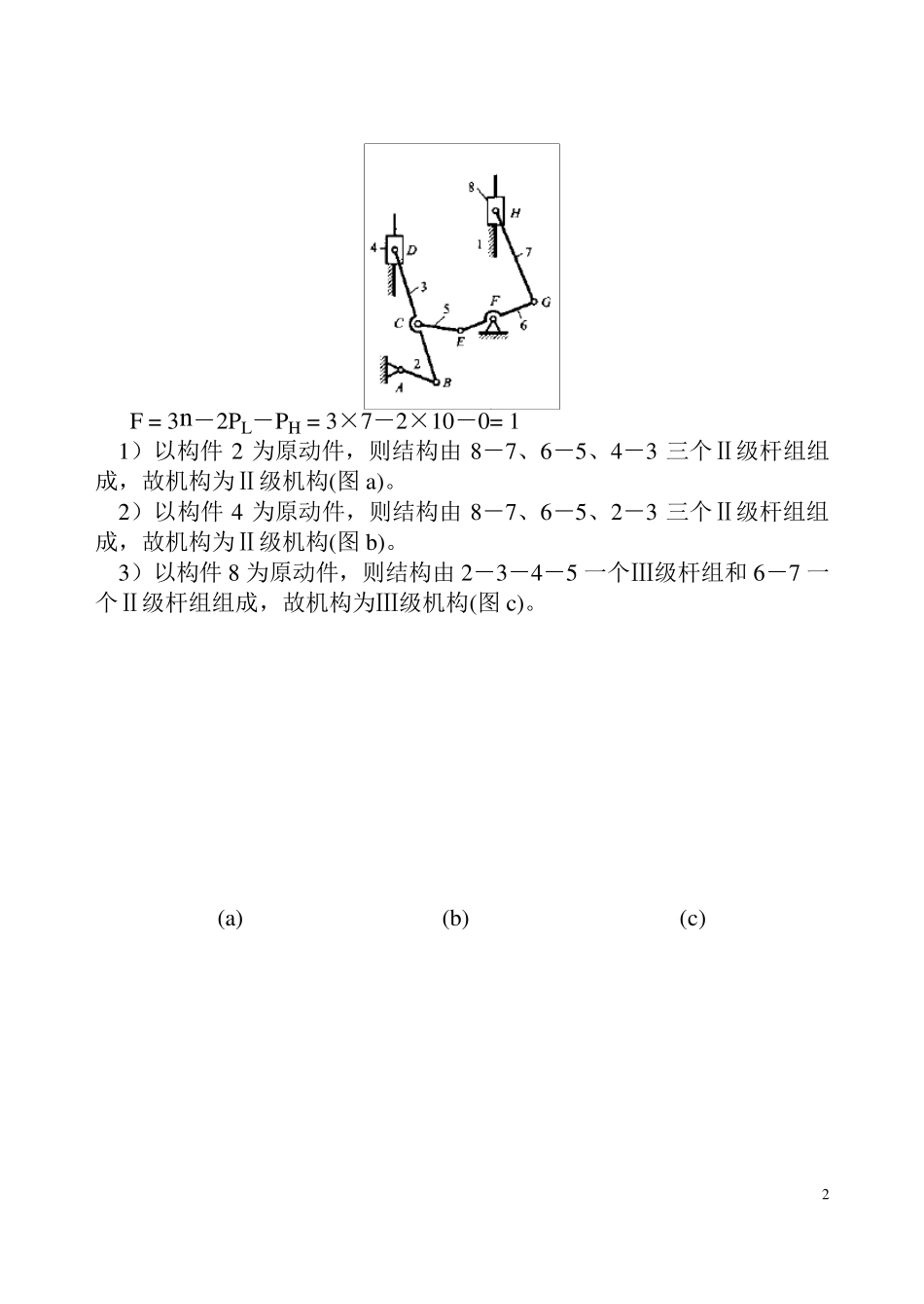
3 解: 2 F = 3n-2PL-PH = 3×7-2×10-0= 1 1)以构件 2 为原动件,则结构由 8-7、6-5、4-3 三个Ⅱ级杆组组成,故机构为Ⅱ级机构(图 a)
2)以构件 4 为原动件,则结构由 8-7、6-5、2-3 三个Ⅱ级杆组组成,故机构为Ⅱ级机构(图 b)
3)以构件 8 为原动件,则结构由 2-3-4-5 一个Ⅲ级杆组和 6-7 一个Ⅱ级杆组组成,故机构为Ⅲ级机构(图 c)
(a) (b) (c) 3 第二章 运动分析作业 2
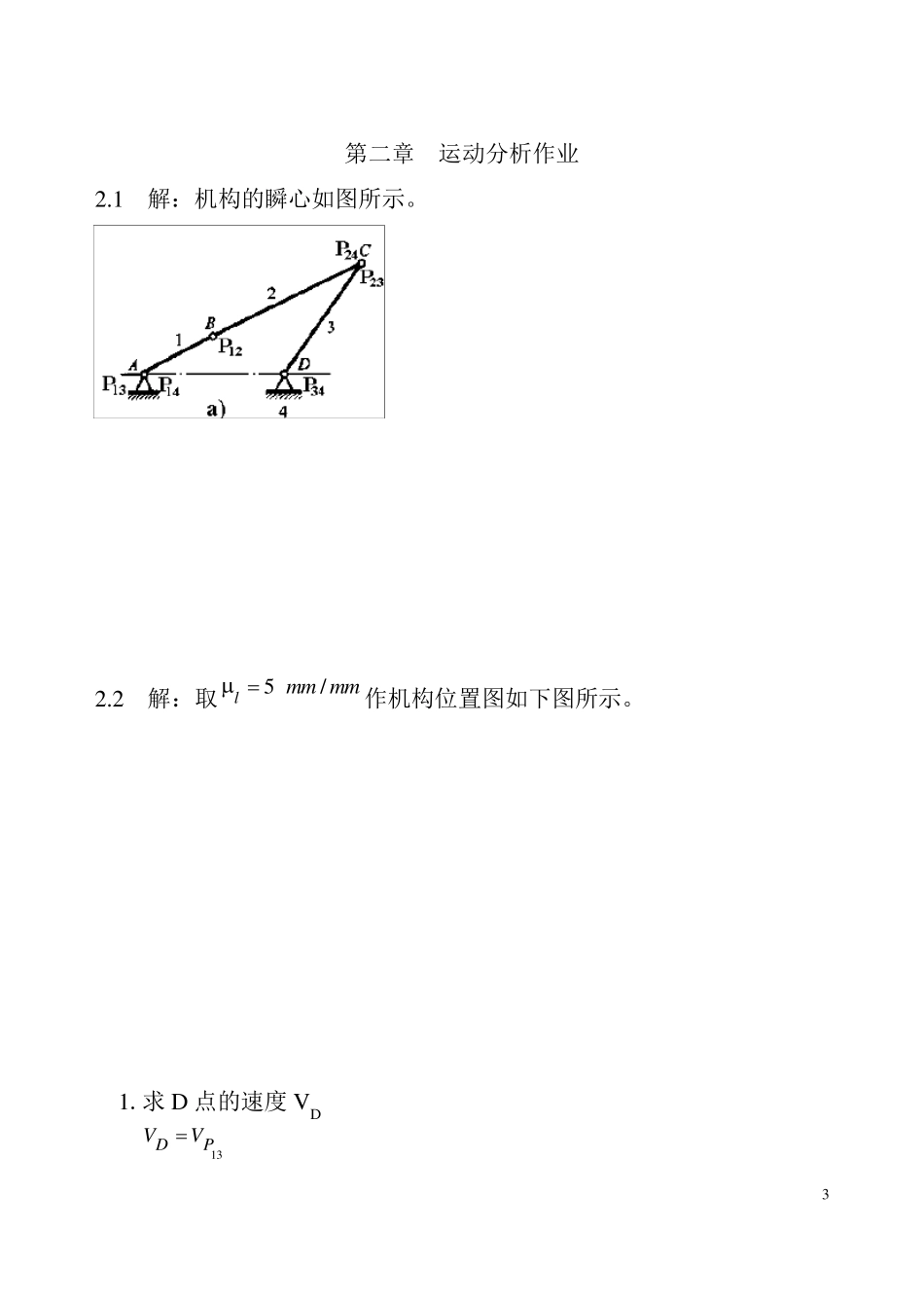
1 解:机构的瞬心如图所示
2 解:取m mm ml/5作机构位置图如下图所示
求 D 点的速度 V D 13PDVV 4 而 25241314PPAEVVED ,所以 smmVVED/14425241502524 2
求ω1 sradlVAEE/25
11201501 3
求ω2 因 98382412141212PPPP ,所以srad /46
0983825
1983812 4
求C 点的速度VC smmCPVlC/2
10154446
0242 2
3 解:取mmmml/1作机构位置图如下图a 所示
求B2 点的速度VB2 VB2 =ω