机构自由度计算方法 机 构 自 由 度 的 计 算 例子 机械原理 机构自由度的计算是机构的结构分析的重要内容
任何一个机构设计好以后,需要做的第一件事情就是计算机构的自由度
机构自由度的计算公式是:F=3n-2pl-ph
公式本身简单,只需要数出活动构件的数目n,低副的数目pl,高副的数目ph,则自由度就很容易计算了
使用该公式有一个前提,就是要先判断出一些特殊情况:复合铰链,局部自由度和虚约束,在把这些情况都弄清楚后,再用上述公式计算,才可以得到正确的结果
下面举一个例子,说明机构自由度的计算方法
计算图示机构的自由度,并判断该机构是否具有确定运动
如有复合铰链、局部自由度、虚约束,请直接在题图中标出
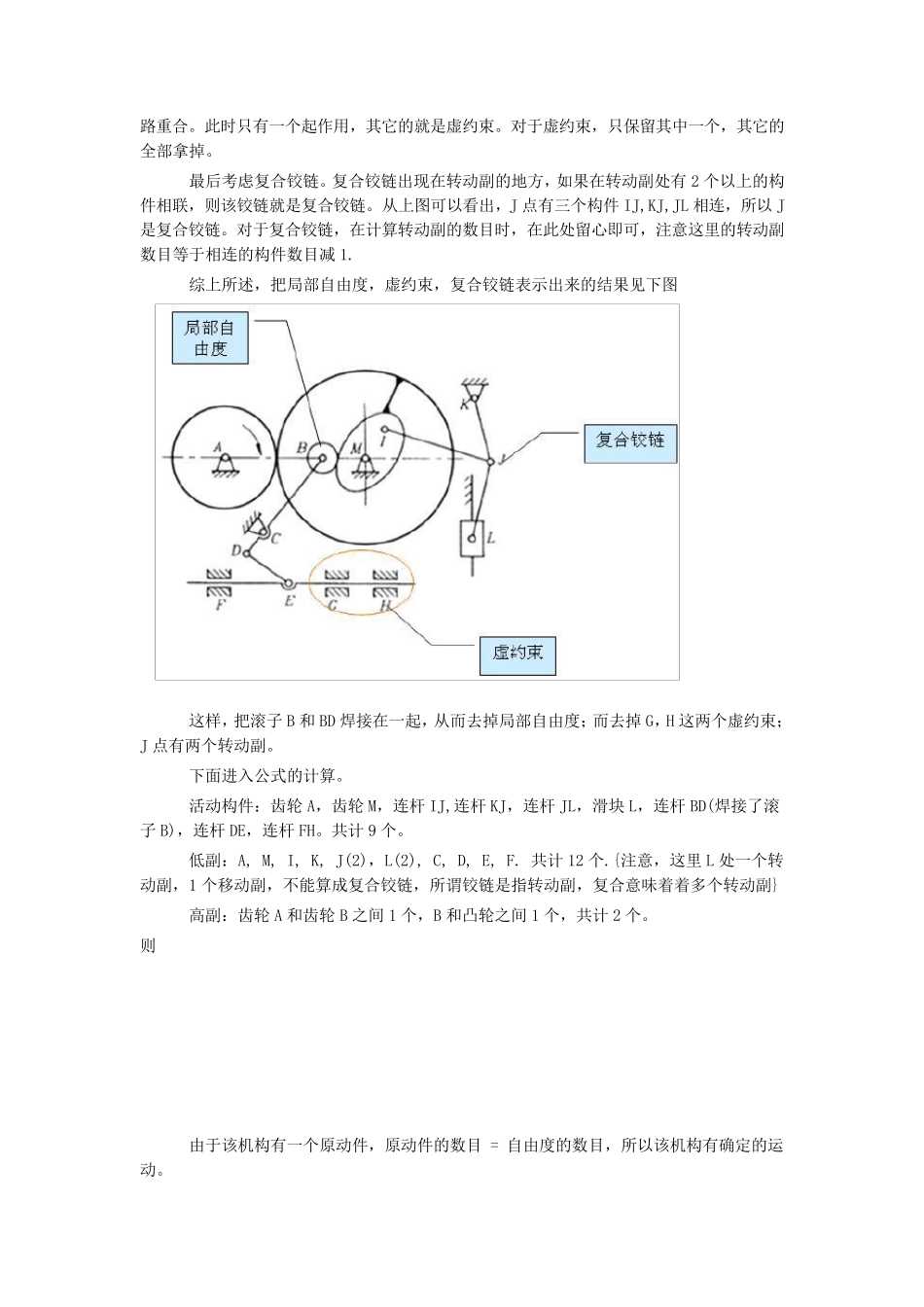
拿到该机构以后,第一步就是找到凸轮 M,发现推杆 DB 尖端有一个滚子,此滚子就是局部自由度
局部自由度几乎永远出现在滚子推杆的凸轮机构中
对于该局部自由度,处理方法是把该滚子B 与 BD 杆焊接在一起,成为一个整体
接着考察虚约束
虚约束中最常见的就是某一个构件和机架之间有导路重合或者平行的移动副
这里 FH 构件就在F,G,H 三个地方有三个移动副与机架相联,而这三个移动副导路重合
此时只有一个起作用,其它的就是虚约束
对于虚约束,只保留其中一个,其它的全部拿掉
最后考虑复合铰链
复合铰链出现在转动副的地方,如果在转动副处有 2 个以上的构件相联,则该铰链就是复合铰链
从上图可以看出,J 点有三个构件 IJ,KJ,JL 相连,所以 J是复合铰链
对于复合铰链,在计算转动副的数目时,在此处留心即可,注意这里的转动副数目等于相连的构件数目减 1
综上所述,把局部自由度,虚约束,复合铰链表示出来的结果见下图 这样,把滚子 B 和 BD 焊接在一起,从而去掉局部自由度;而去掉 G,H 这两个虚约束;J 点有两个转动副
下面进入公式的计算
活动构件:齿轮 A