Pix4Dmapper 软件处理无人机数据操作流程 一、 Pix4Dmapper软件处理无人机数据包括以下几个步骤: 1
Pix4Dmapper 软件安装步骤
原始资料准备
成果数据检查
正射影像镶嵌编辑
二、 具体操作步骤如下: (一) Pix4Dmapper 软件安装步骤 1
打开 Pix4Dmapper 软件安装包所在的文件夹
鼠标双击安装包中的“”,打开安装程序
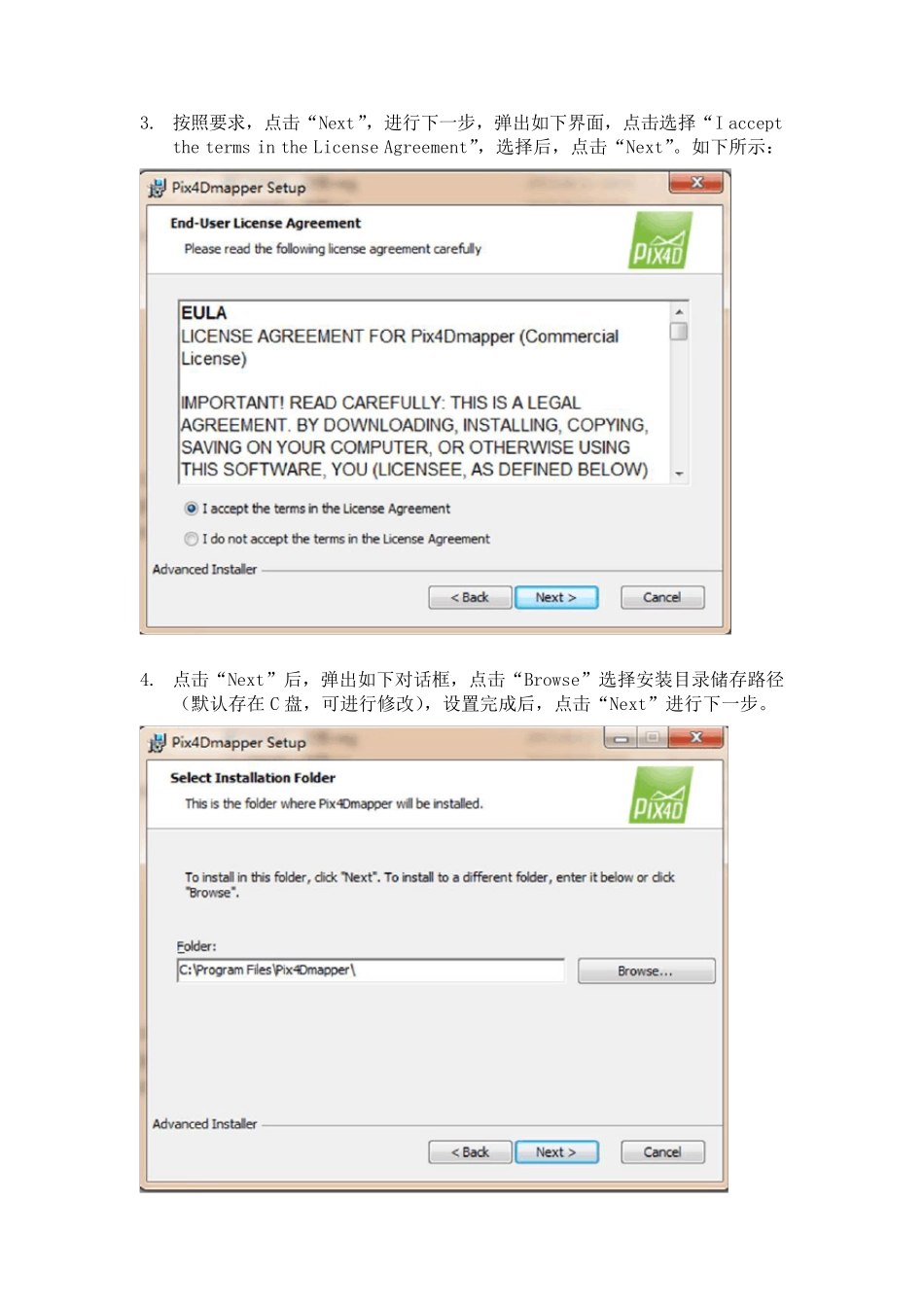
按照要求,点击“Next”,进行下一步,弹出如下界面,点击选择“I accept the terms in the License Agreement”,选择后,点击“Next”
如下所示: 4
点击“Next”后,弹出如下对话框,点击“Browse”选择安装目录储存路径(默认存在 C 盘,可进行修改),设置完成后,点击“Next”进行下一步
在弹出的对话框中,点击“Install”
在弹出的对话框中,选择“Finish”,完成安装
安装完成后,返回到安装包文件夹,鼠标双击“”,在弹出的对话栏中,选择“是”,如下所示: 8
点击“是”后,在弹出的对话框中,单击选择“确定”,完成软件注册
接下来,返回到安装包文件夹,复制“”
打开软件的安装目录所在的文件夹,把“”粘贴到安装目录文件夹里
完成以上操作,软件安装步骤全部完成
可以点击桌面“”图标,打开软件
(二) 原始资料准备 1
原始资料包括影像数据、POS 数据以及控制点数据
原始数据的分类: 1) 对采集回来还未进行分类的照片,需要按照“正射、倾斜、全景”三方面进行照片分类
2) 首先,进行航次的划分
可以按照照片的拍摄时间进行分类,例如:两张照片之间的拍摄时间相差较大(