1 教案首页 课程名称 农业机器人 任课教师 李玉柱 第3 章 机器人运动学和动力学 计划学时 3 教学目的和要求: 1
概述,齐次坐标与动系位姿矩阵,了解平移和旋转的齐次变换; 2
机器人的运动学方程的建立与求解*; 3
机器人的动力学* 重点: 1
机器人操作机运动学方程的建立及求解; 2
工业机器人运动学方程 3
机器人动力学 难点: 1
机器人动力学方程及雅可比矩阵基本原理 思考题: 1
简述齐次坐标与动系位姿矩阵基本原理
连杆参数及连杆坐标系如何建立
机器人动力学方程及雅可比矩阵基本原理是什么
2 第3 章 机器人运动学和动力学 教学主要内容: 3
2 齐次坐标与动系位姿矩阵 3
3 齐次变换 3
4 机器操作机运动学方程的建立与求解 3
5 机器人运动学方程 3
6 机器人动力学 本章将主要讨论机器人运动学和动力学基本问题
先后引入了齐次坐标与动系位姿矩阵、齐次变换,通过对机器人的位姿分析,介绍了机器人运动学方程;在此基础上有对机器人运动学方程进行了较为深入的探讨
1 概述 机器人,尤其是关节型机器人最有代表性
关节型机器人实质上是由一系列关节连接而成的空间连杆开式链机构,要研究关节型机器人,必须对运动学和动力学知识有一个基本的了解
分析机器人连杆的位置和姿态与关节角之间的关系,理论称为运动学,而研究机器人运动和受力之间的关系的理论则是动力学
2 齐次坐标与动系位姿矩阵 3
1 点的位置描述 在关节型机器人的位姿控制中,首先要精确描述各连杆的位置
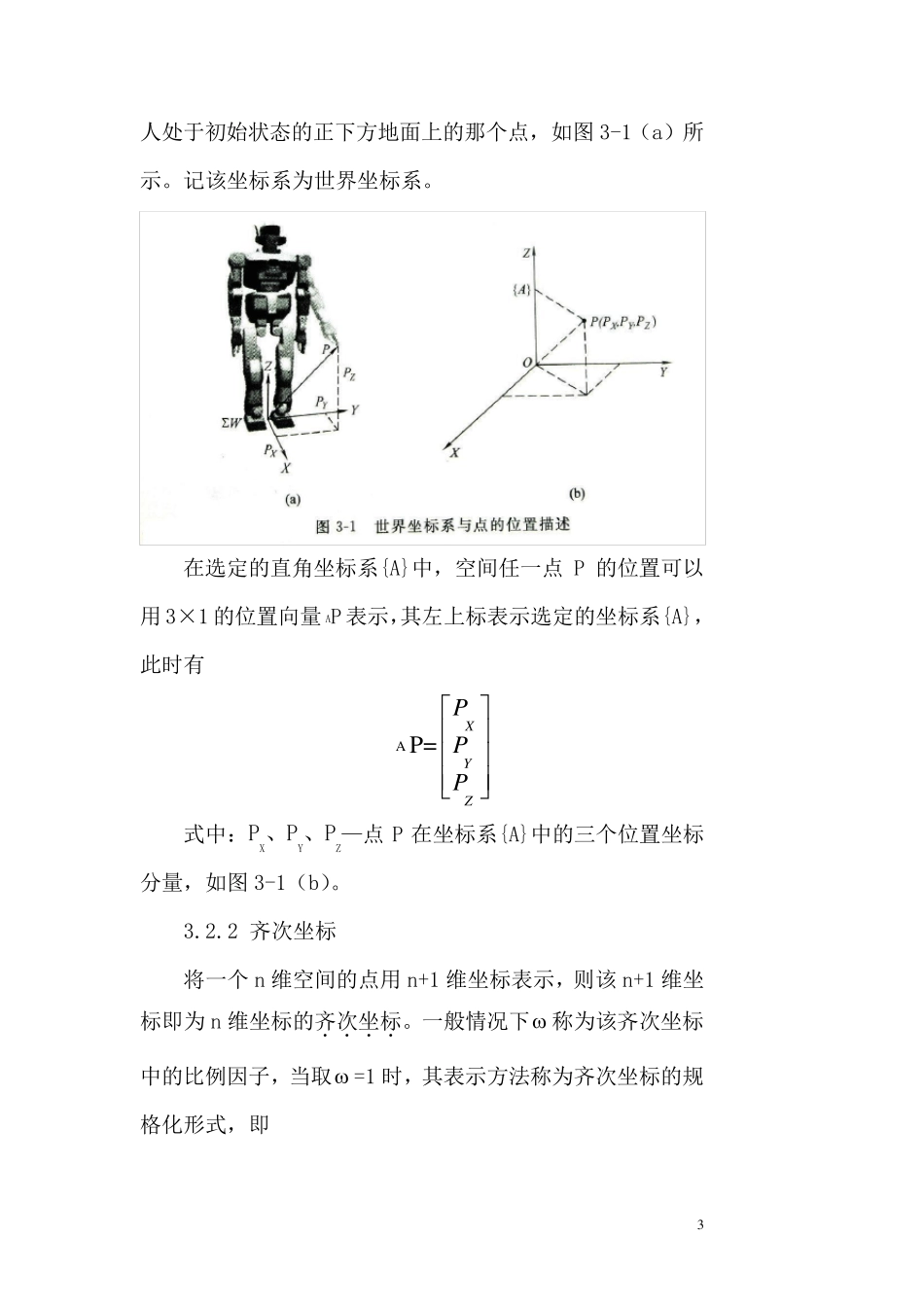
为此,先定义一个固定的坐标系,其原点为机器 3 人处于初始状态的正下方地面上的那个点,如图3-1(a)所示
记该坐标系为世界坐标系
在选定的直角坐标系{A}中,空间任一点P 的位置可以用3×1 的位置向量 AP 表示,其左上标表示选定的坐标系{A}