重 复 控 制理论 2
1 重 复 控 制的基本思想 重 复 控 制 是 基 于 内 模 原 理 的 一 种 控 制 思 想
所 谓 “内 模 ”,是 指在稳定的 闭环控 制 系统中包含外部输入信号的 数学模 型
下面是 内 模 原 理 的 具体描述:对于一 个控 制 系统而言,如果控 制 其的 反馈来自被调节的 信号,且在反馈回路中包含相同的 被控 外部信号动态模 型,那么整个系统是 结构稳定的
内 模 原 理 的 本质是把系统外部信号的 动力学模 型植入控 制 器以构成高精度的 反馈控 制 系统
这样的系统能够无静差的 跟踪输入信号
对于 所 有的 无静差系统,都存在这样的 问题,即当输入信号趋于 0 时,如何保证继续输出适当的 控 制 信号,以维持合适的 控 制作用
此时虽然给定信号和反馈信号依然存在,但误差信号为 0,系统信号通道已经断开,输出与输入无关,这就要求控 制 器中必须包含能够反映外部指令或干扰的 模 型,该模 型能持续不断地输出相应的 控 制 信号
从这个角度来说,内 模 的作用类似于 一 个信号发生器,可以不依赖外部变量给出的 控 制 信号
由控 制 理 论知道,含有积分环节的 闭环控 制 系统可以无静差的 跟踪阶跃信号,而且可以完全抵消作用在积分环节之后的 阶跃型干扰
可从内 模 原 理 的 角度对此作出解释,阶跃信号的 数学模 型为1/s,而闭环系统中的 积分环节也是 1/s,系统包含了外部信号的 数学模 型,从而获得来无静差的 跟踪给定信号的 能力,可以将积分控 制 理 解为内 模 原 理 的 一 个典型应用
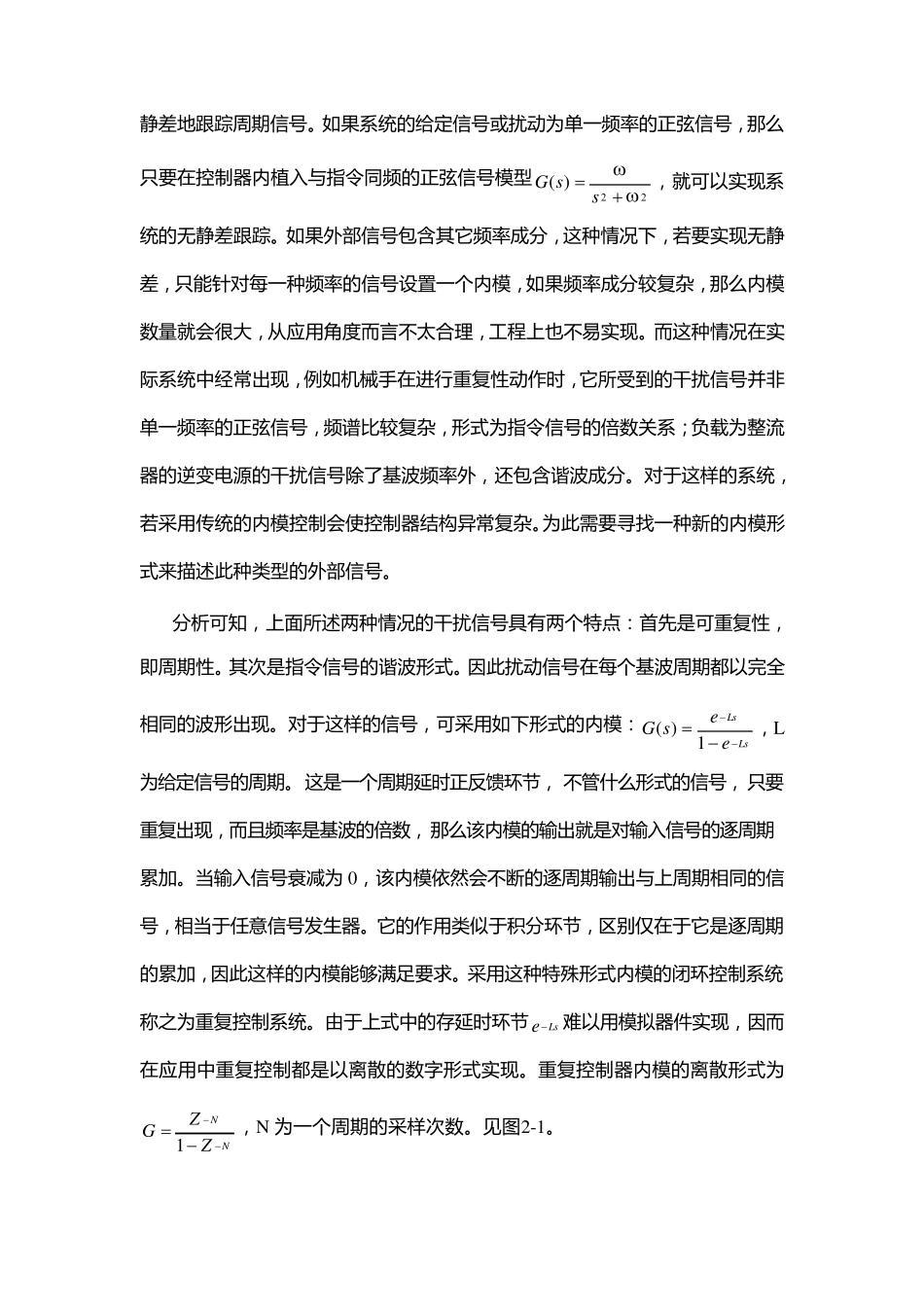
当内 模 中的 数学模 型描述的 是 周期性的 信号时,那么闭环控 制 系统就能够无静 差 地 跟 踪 周 期 信 号
如果系统的给定信 号 或扰动为单一频率的正弦信 号 ,那么只要在控制器内植入与指令同频的正弦信 号