智 能 厨 房 助 手 机 器 人同济大学设计者:邵谣夏杨宇奥刘继超张瑜马千里指导老师:李梦如1 、 设 计 目 的烹饪是每个家庭日常生活必不可少的一个环节, 而前期的食材准备工作非常繁琐麻烦
首先食材的选择与预处理耗费时间, 并且在烹饪时人们有时很难腾出双手去拿下一步需要的东西,有时会因为同时准备许多道菜肴而手忙脚乱, 这种情况让人们无暇享受烹饪的乐趣
一个智能的厨房助手可以承担人们处理食材的工作,通过语音指令,厨房助手机器人将自动识别并抓取用户指定的、在桌面上的食材,并放入相应的处理器中( 切丝、切片等) ,通过处理器处理过的食材即可以用于人们进一步烹饪
整个过程全部自动化处理,用户只需发出语音指令,即可控制烹饪助手处理食材,节约人们在厨房做饭时处理食材的时间, 使得人们可以专注于烹饪菜肴, 增加烹饪的乐趣
我们需要设计的是一个可以减轻烹饪者负担,并且易于操作, 稳定可靠的厨房助手
它不只是替我们完成反复繁琐的动作, 更是可以在指令下自主完成工作的,智能的机器人助手
2 、 工 作 原 理2
1 机器人小车部分针对厨房助手机器人部分,我们采纳上位机下位机编程模式进行编程
硬件方面包括一个架于桌面上且与电脑相连的 USB 摄像头、自主设计组装的机器人底盘、安装在机器人底盘四周的红外线传感器以及架于底盘上的机械手
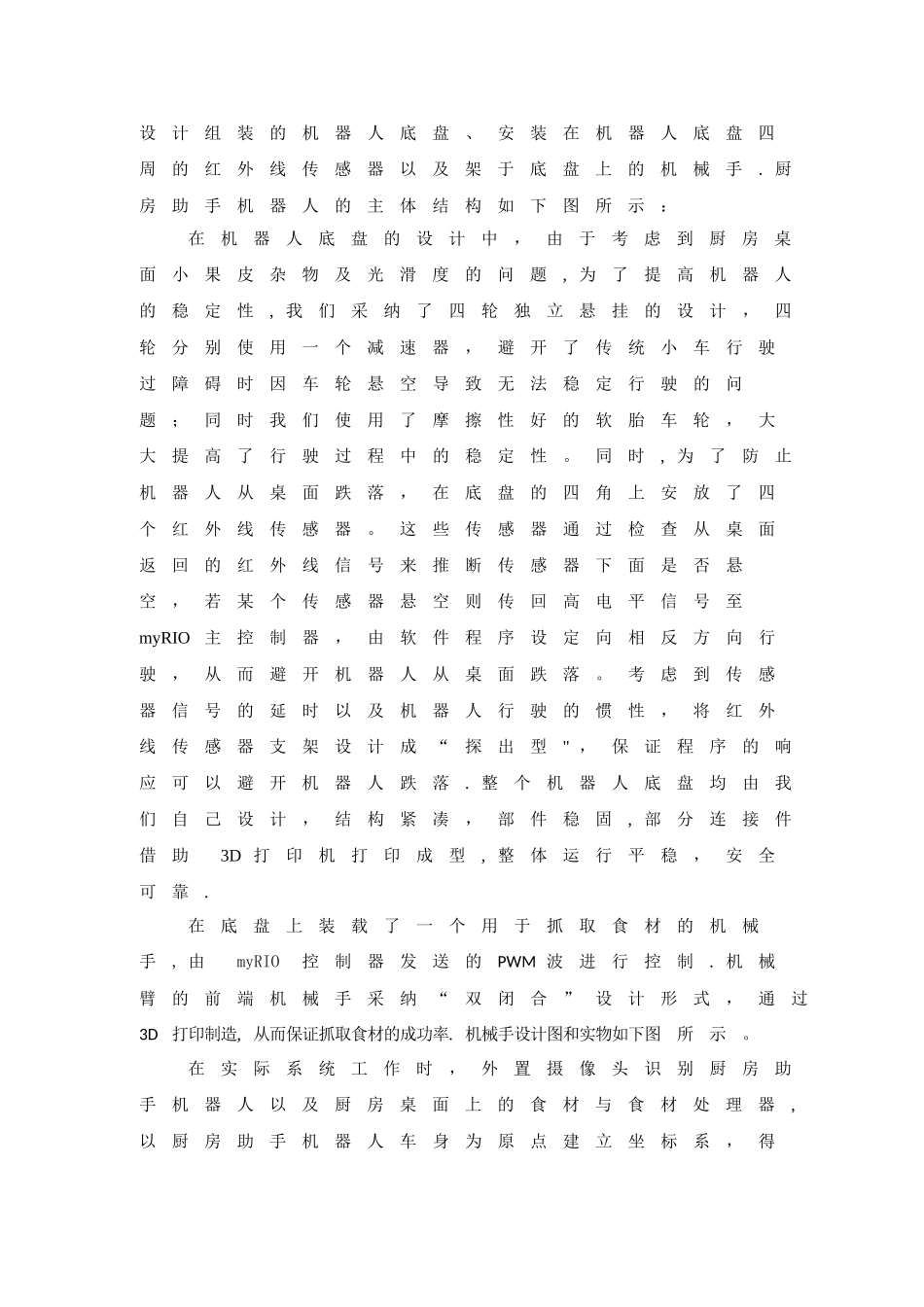
厨房助手机器人的主体结构如下图所示:在机器人底盘的设计中,由于考虑到厨房桌面小果皮杂物及光滑度的问题, 为了提高机器人的稳定性, 我们采纳了四轮独立悬挂的设计,四轮分别使用一个减速器,避开了传统小车行驶过障碍时因车轮悬空导致无法稳定行驶的问题;同时我们使用了摩擦性好的软胎车轮,大大提高了行驶过程中的稳定性
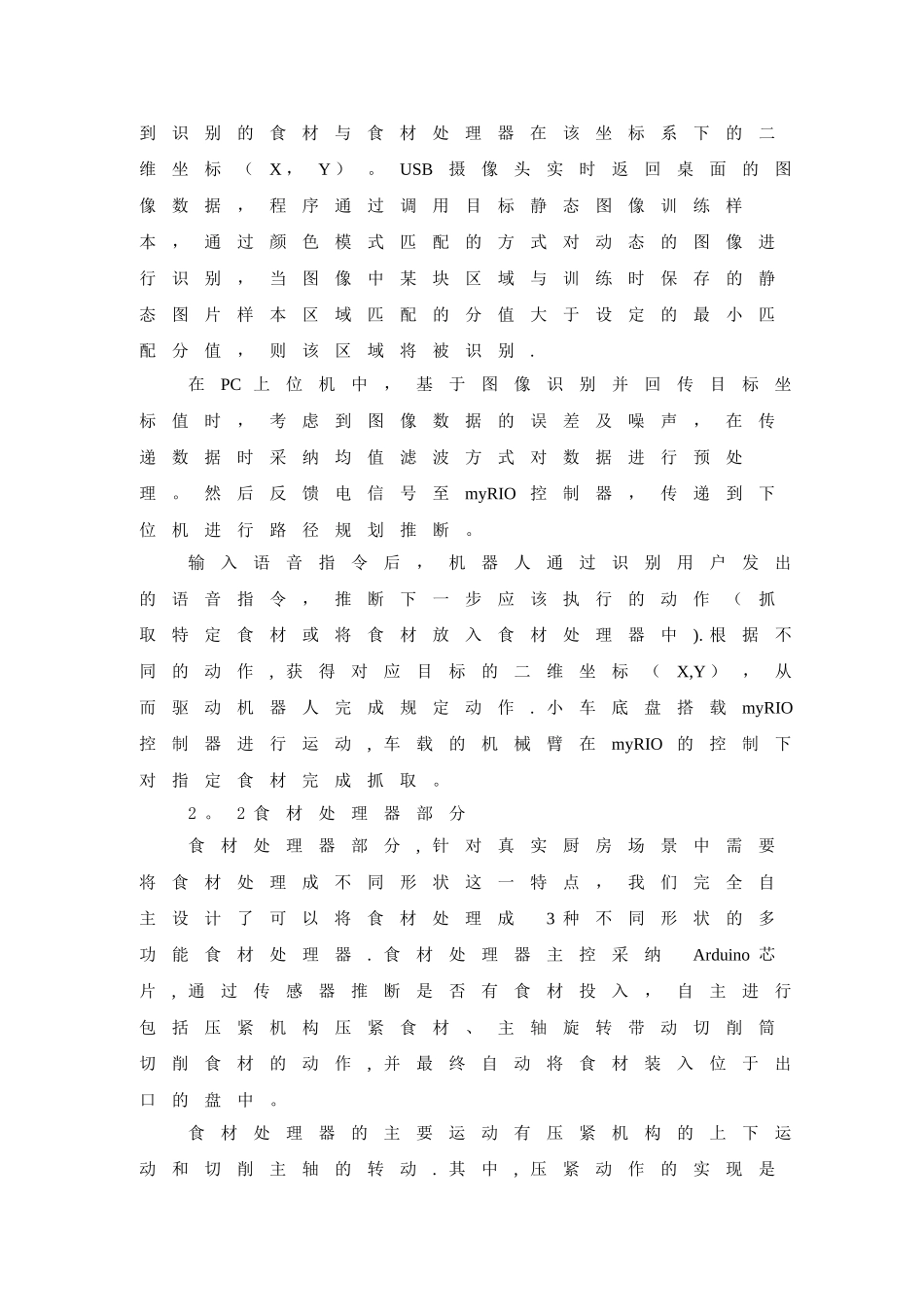
同时, 为了防止机器人从桌面跌落,在底盘的四角上安放了四个红外线传感器
这些传感器通过检查从桌面返回的红外线信号来推断传感器下面是否悬空,若某个传感器悬空