1、简答题 1、控制系统的基本要求
1)、简述闭环控制系统的组成
测量元件,给定元件,比较元件,放大元件,执行元件,校正元件2)、非最小相位系统有何特点,与最小相位系统的区别是什么
第二题在复平面【s】右半平面没有极点和零点的传递函数称为最小相位传递函数,反之,在【s】右半平面有极点和零点的传递函数称为非最小相位传递函数
具有最小相位传递函数的系统统称为最小相位系统,反之,具有非最小相位传递函数的系统称为最小相位系统3)、简述系统串联滞后校正网络的校正原理
此滞后校正环节是一个低通滤波器,因为当频率高于1/T时,增益全部下降20lgb(db),而相位减小不多
假如把这段频率范围的增益提高到原来的增益直,当然低频段的增益就提高了
4)、简述系统超前校正网络的校正原理在对数幅频特性曲线上有20db/dec段存在,故加大了系统的剪切频率Wc、谐振频率Wr与截止频率Wb,其结果是加大了系统的带宽,加快了系统的响应速度;又由于相位超前,还可能加大相位裕度,结果是增加了系统相位稳定性
5)、减小或消除系统稳态误差的措施主要有哪些
1:增大系统开环增益或扰动之前系统的前向通道增益2:在系统的前向通道或主反馈通道设置串联积分环节3:采纳串级控制抑制内回路扰动
6)、简要说明比例积分微分 PID 控制规律中 P、I 和 D 的作用 (1)比例系数Kp直接决定控制作用的强弱,加大Kp可以减小系统的稳定误差,提高系统的动态响应速度,但Kp过大会使动态质量变坏,引起被控制量震荡甚至导致闭环系统不稳定(2)在比例的调节的基础上加上积分控制可以消除系统的稳态误差,因为只要存在偏差,它的积分所产生的控制量总是用来消除稳态误差,直到积分的直为零,控制作用才停止(3)微分的控制作用是跟偏差的变化速度有关
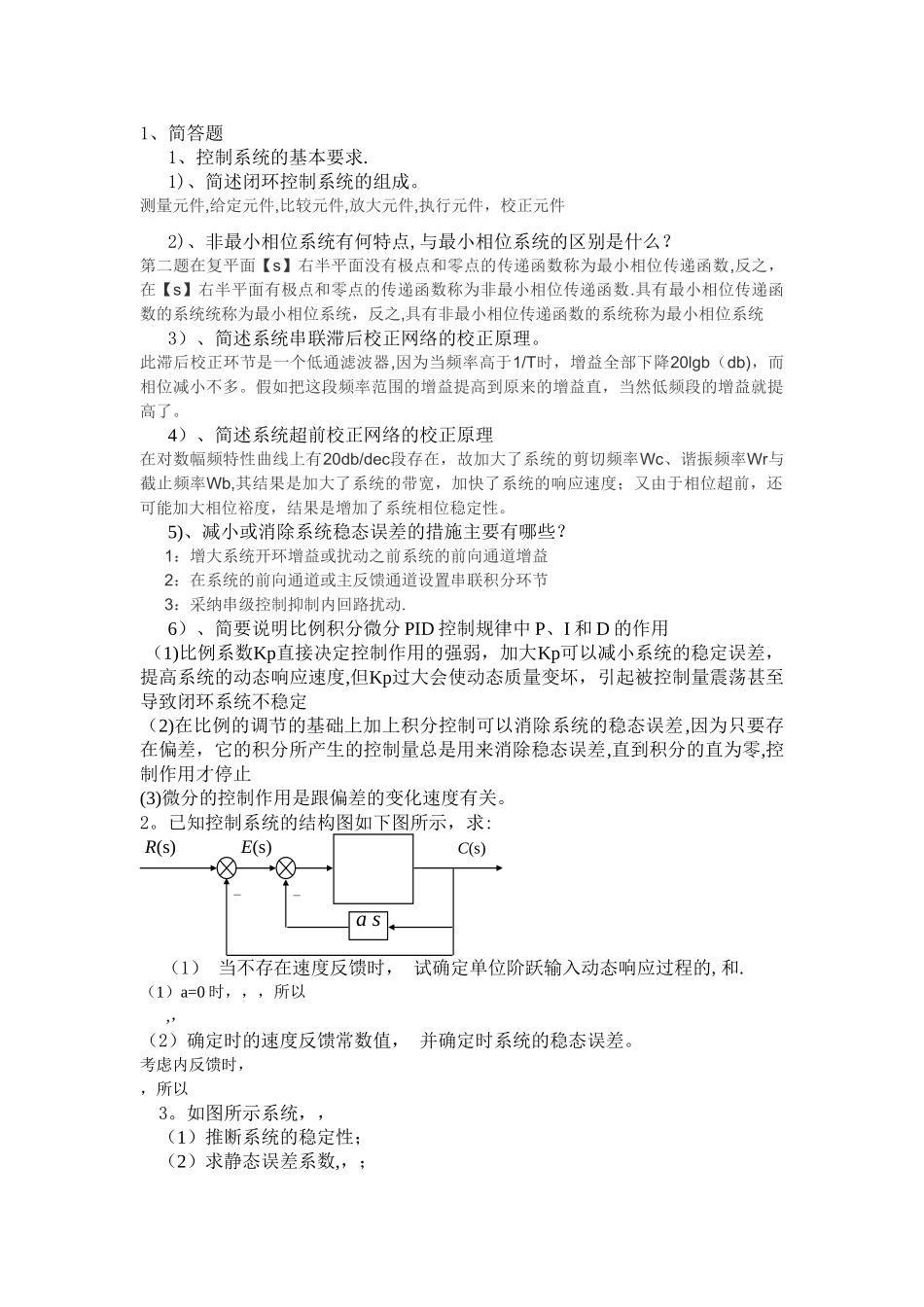
已知控制系统的结构图如下图所示,求: (1) 当不存在速度反馈时, 试确定单位阶跃输入动态响应过程的