实验九 控制系统的 PI 校正设计及仿真一、实验目的1
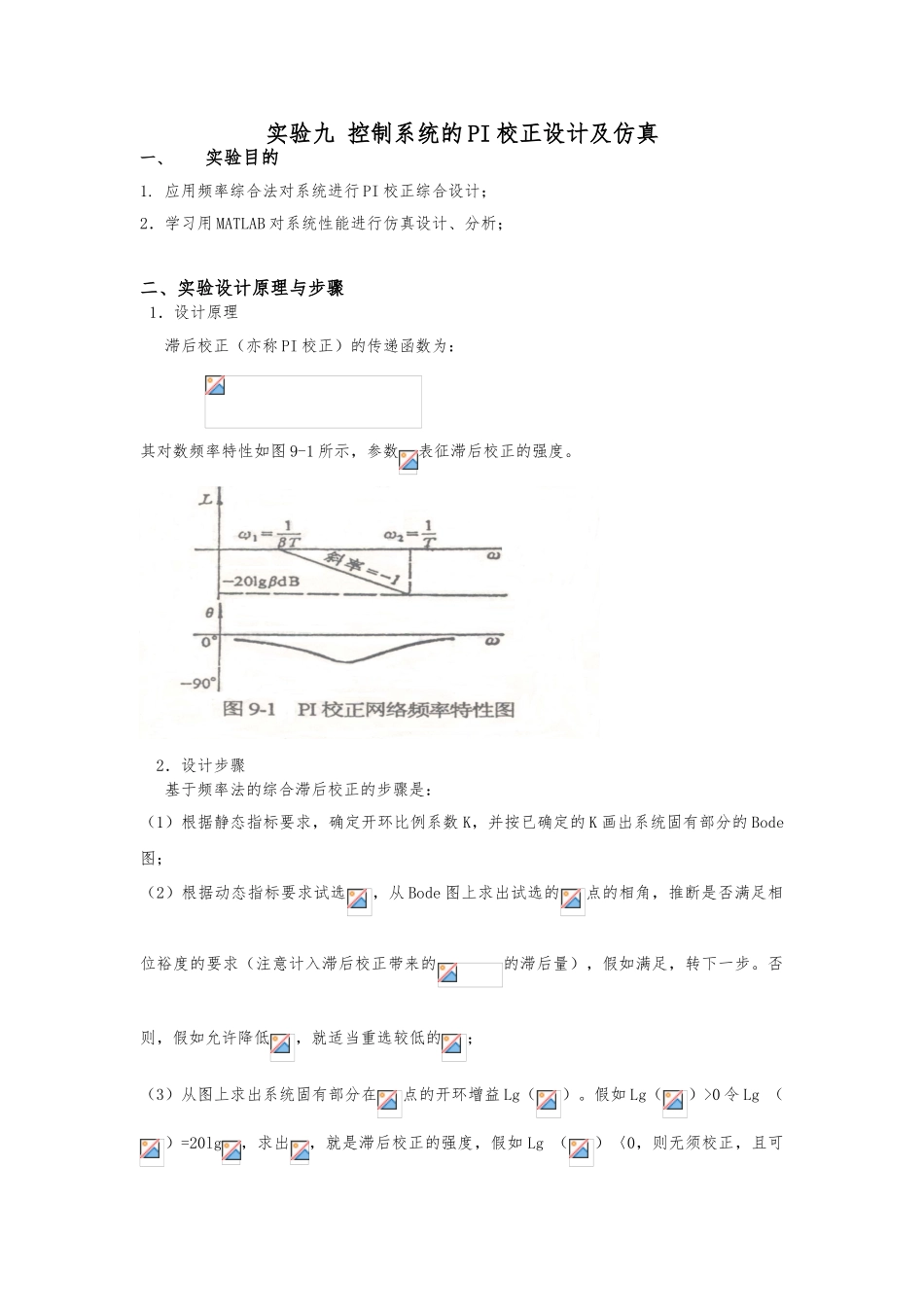
应用频率综合法对系统进行 PI 校正综合设计;2.学习用 MATLAB 对系统性能进行仿真设计、分析;二、实验设计原理与步骤 1.设计原理 滞后校正(亦称 PI 校正)的传递函数为: 其对数频率特性如图 9-1 所示,参数表征滞后校正的强度
2.设计步骤 基于频率法的综合滞后校正的步骤是:(1)根据静态指标要求,确定开环比例系数 K,并按已确定的 K 画出系统固有部分的 Bode图;(2)根据动态指标要求试选,从 Bode 图上求出试选的点的相角,推断是否满足相位裕度的要求(注意计入滞后校正带来的的滞后量),假如满足,转下一步
否则,假如允许降低,就适当重选较低的;(3)从图上求出系统固有部分在点的开环增益 Lg()
假如 Lg()>0 令 Lg ()=20lg,求出,就是滞后校正的强度,假如 Lg ()〈0,则无须校正,且可将开环比例系数提高
(4)选择,进而确定
(5)画出校正后系统的 Bode 图,校核相位裕量
滞后校正的主要作用是降低中频段和高频段的开环增益,但同时使低频段的开环增益不受影响,从而达到兼顾静态性能与稳定性
它的副作用是会在点产生一定的相角滞后
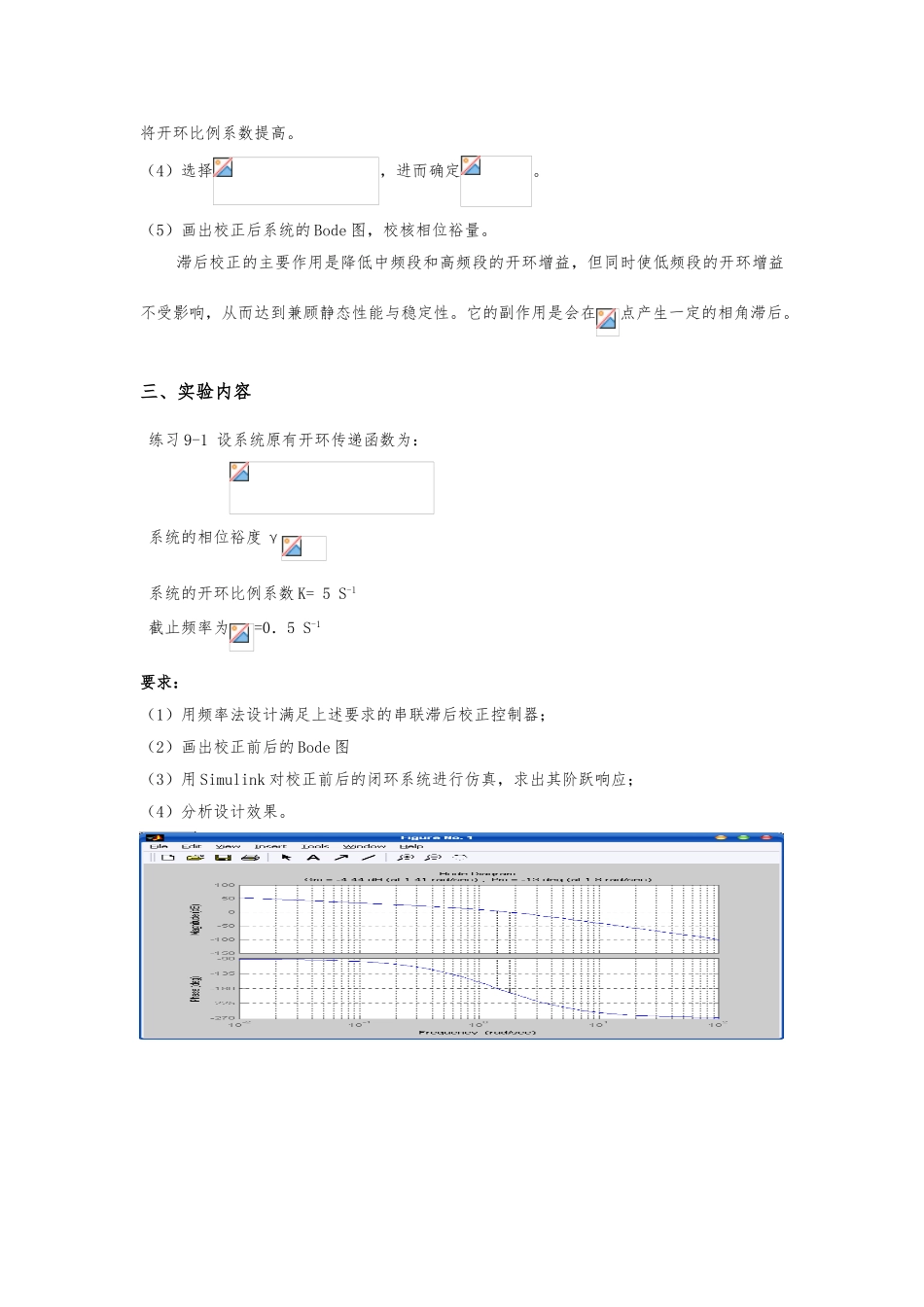
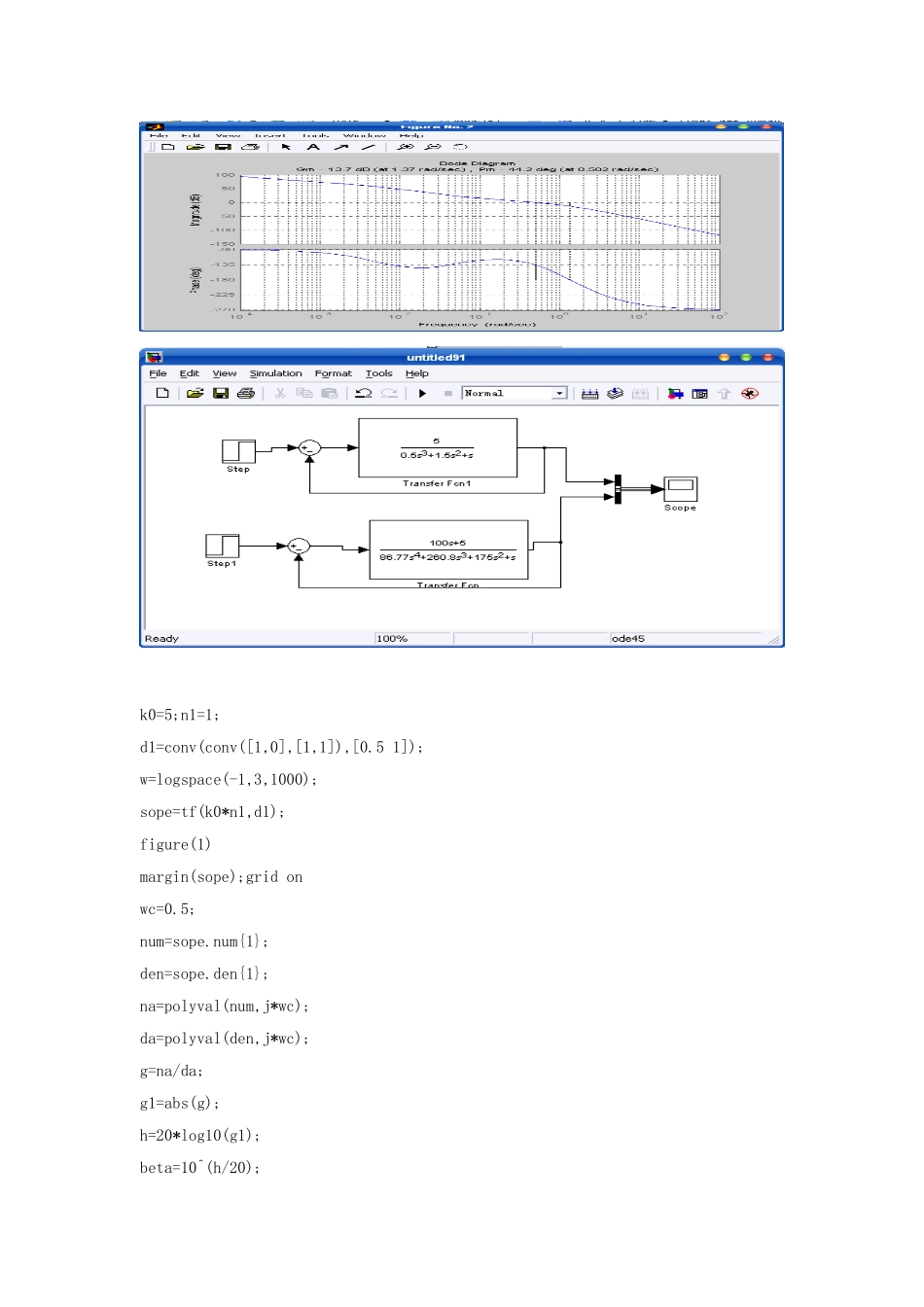
三、实验内容 练习 9-1 设系统原有开环传递函数为: 系统的相位裕度 γ 系统的开环比例系数 K= 5 S-1 截止频率为=0.5 S-1要求:(1)用频率法设计满足上述要求的串联滞后校正控制器;(2)画出校正前后的 Bode 图(3)用 Simulink 对校正前后的闭环系统进行仿真,求出其阶跃响应;(4)分析设计效果
k0=5;n1=1;d1=conv(conv([1,0],[1,1]),[0
5 1]);w=logspace(-1,3,1000);sope=tf(k0*n1,d1);figure(1)margin(sope);grid onwc