摘要本次竞赛 C 题的任务为设计并制作一个旋转式倒立摆,能够使摆杆做圆周运动,并且实现倒立功能
对此我们的作品采纳自制支架,旋臂和摆杆
电机采纳伺服电机,以 STC12C5A60S2 为控制芯片,利用精密塑料电位计测量摆杆转角,经过数学建模和多次数据采集建立模糊数学模型,利用 PID 实现对摆杆的实时控制
关键词:STC12C5A60S2 塑料电位计 PID 控制器一、设计任务1、任务设计并制作一套简易旋转倒立摆与其控制装置
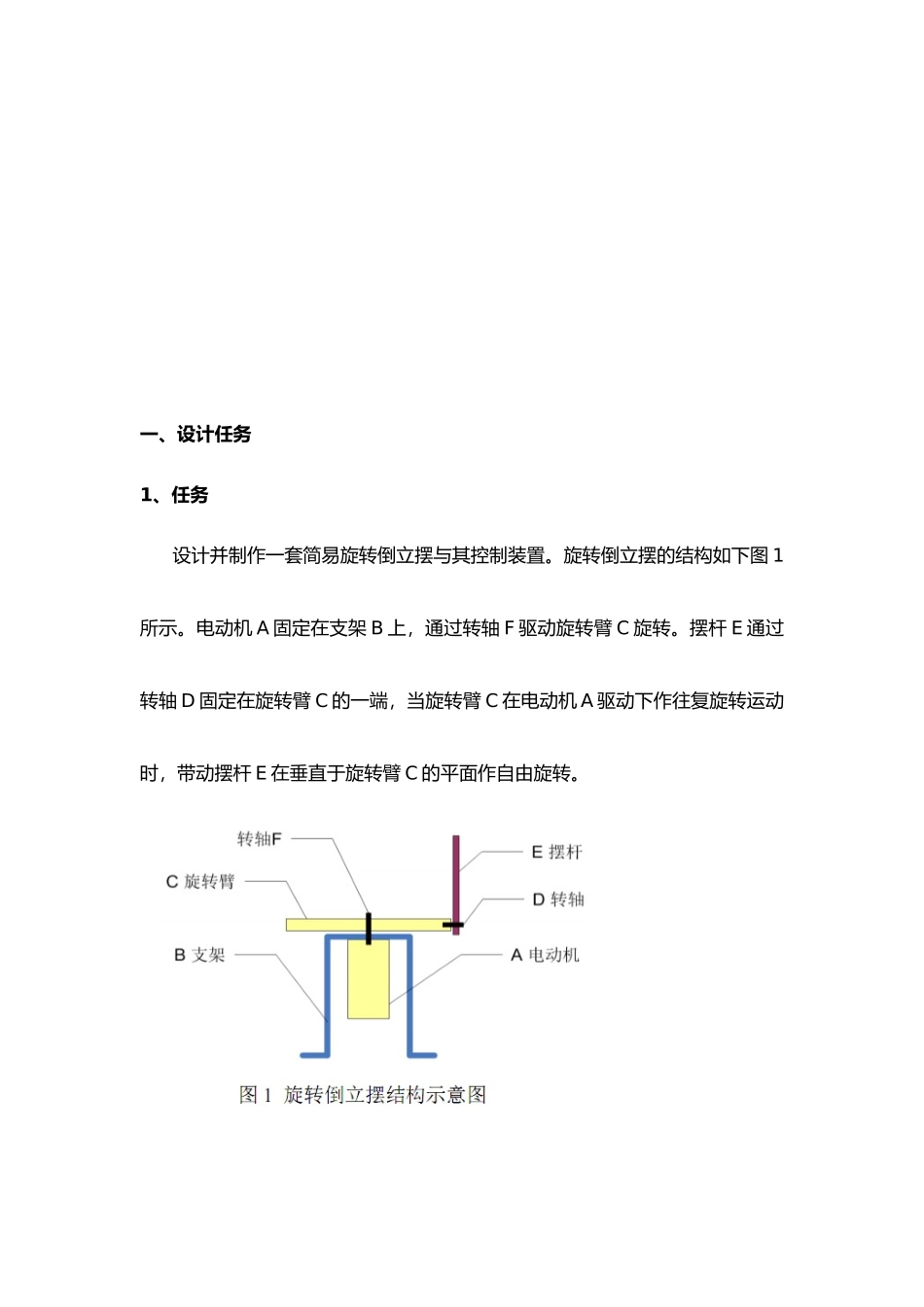
旋转倒立摆的结构如下图 1所示
电动机 A 固定在支架 B 上,通过转轴 F 驱动旋转臂 C 旋转
摆杆 E 通过转轴 D 固定在旋转臂 C 的一端,当旋转臂 C 在电动机 A 驱动下作往复旋转运动时,带动摆杆 E 在垂直于旋转臂 C 的平面作自由旋转
2、基本要求(1)摆杆从出于自然下垂状态(摆角)开始,驱动电机带动旋转臂做往复旋转使摆杆摆动,并尽快使摆角达到或超过; (2)从摆杆出于自然下垂状态开始,尽快增大摆杆的摆动幅度,直至完成圆周运动; (3)在摆杆出于自然下垂状态下,外力拉起摆杆至接近位置,外力撤除同时,启动控制旋转臂使摆杆保持倒立状态时间不少于 5s,期间旋转臂的转动角度不大于
3、发挥部分 (1)从摆杆处于自然下垂状态开始,控制旋转臂作往复旋转运动,尽快使摆杆摆起倒立,保持倒立时间不少于 10s; (2)在摆杆保持倒立状态下,施加干扰后摆杆能继续保持倒立或 2s 恢复倒立状态;(3)在摆杆保持倒立状态的前提下,旋转臂作圆周运动,并尽快使单方向转过角度达到或超过 360°;(4)其他
二、系统方案 1、系统结构旋转式倒立摆的机械结构主要包括旋臂、摆杆、直流减速电机以与角位移传感器部分
其中直流减速电机为执行机构,由电机驱动芯片 L298 驱动
旋臂和摆杆之间由角位移传感器连接,摆杆可绕旋臂在垂直平面转动
旋臂和摆杆的角位移信号由角位移传