摘要:为实现多输入、多输出、高度非线不稳定的倒立摆系统平衡稳定控制,将倒立摆系统的非线性模型进行近似线性化处理,获得系统在平衡点附近的线性化模型
利用牛顿—欧拉方法建立直线型一级倒立摆系统的数学模型
在分析的基础上,基于状态反馈控制中极点配置法对直线型倒立摆系统设计控制器
由 MATLAB 仿真表明采纳的控制策略是有效的,设计的控制器对直线型一级倒立摆系统的平衡稳定性效果好,提高了系统的干扰能力
关键词:倒立摆、极点配置、MATLAB 仿真引言:倒立摆是进行控制理论讨论的典型试验平台,由于倒立摆本身所具有的高阶次、不稳定、非线性和强耦合性,许多现代控制理论的讨论人员一直将他视为典型的讨论对象,不断从中发掘出新的控制策略和控制方法
控制器的设计是倒立摆系统的核心容,因为倒立摆是一个绝对不稳定的系统,为使其保持稳定并且可以承受一定的干扰,基于极点配置法给直线型一级倒立摆系统设计控制器1.数学模型的建立倒立摆系统其本身是自不稳定的系统,实验建模存在着一定的困难
在忽略掉一些次要的因素之后,倒立摆系统就是一典型的运动的刚体系统,可以在惯性坐标系中应用经典力学理论建立系统动力学方程
下面采纳牛顿-欧拉方法建立直线型一级倒立摆系统的数学模型
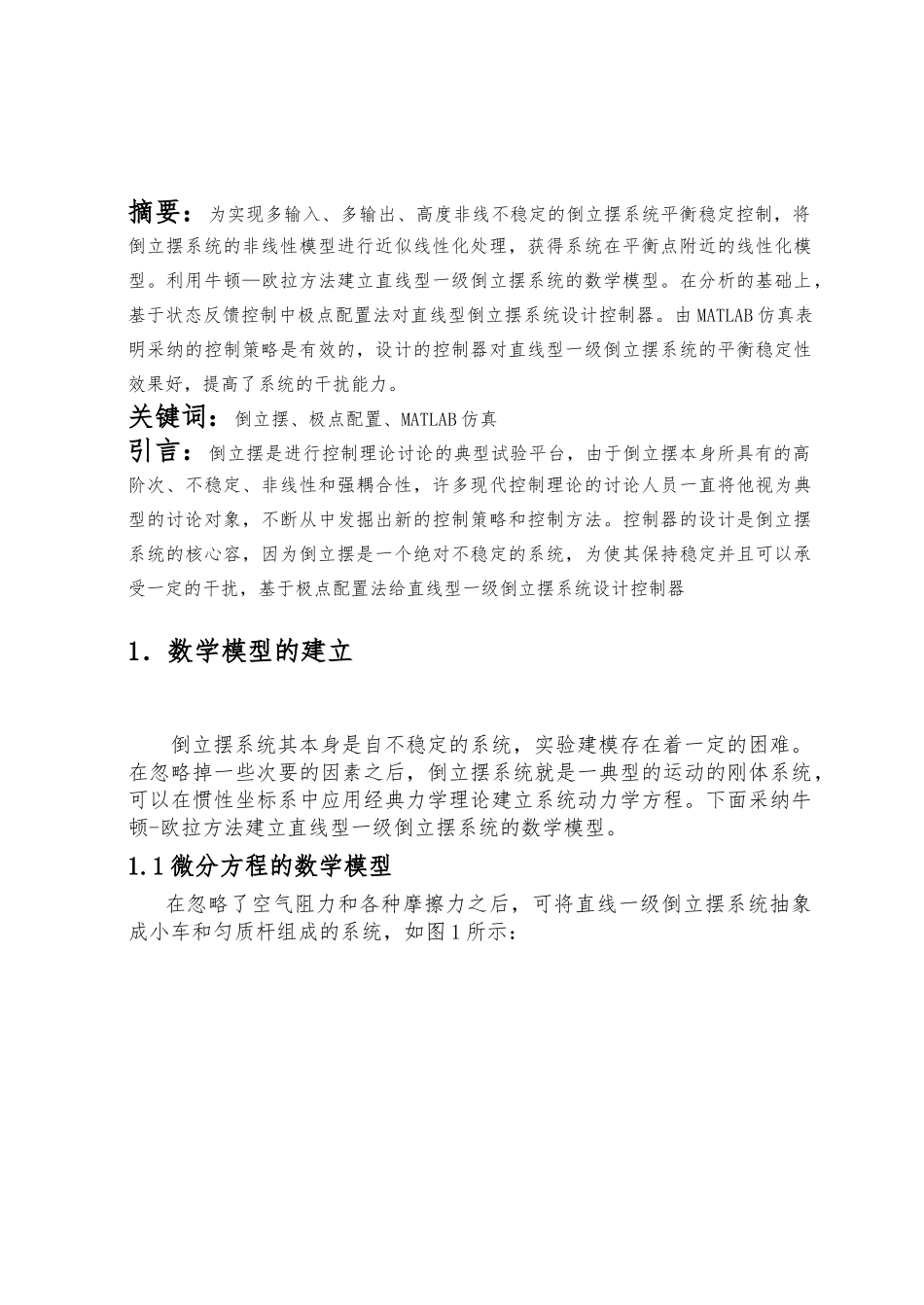
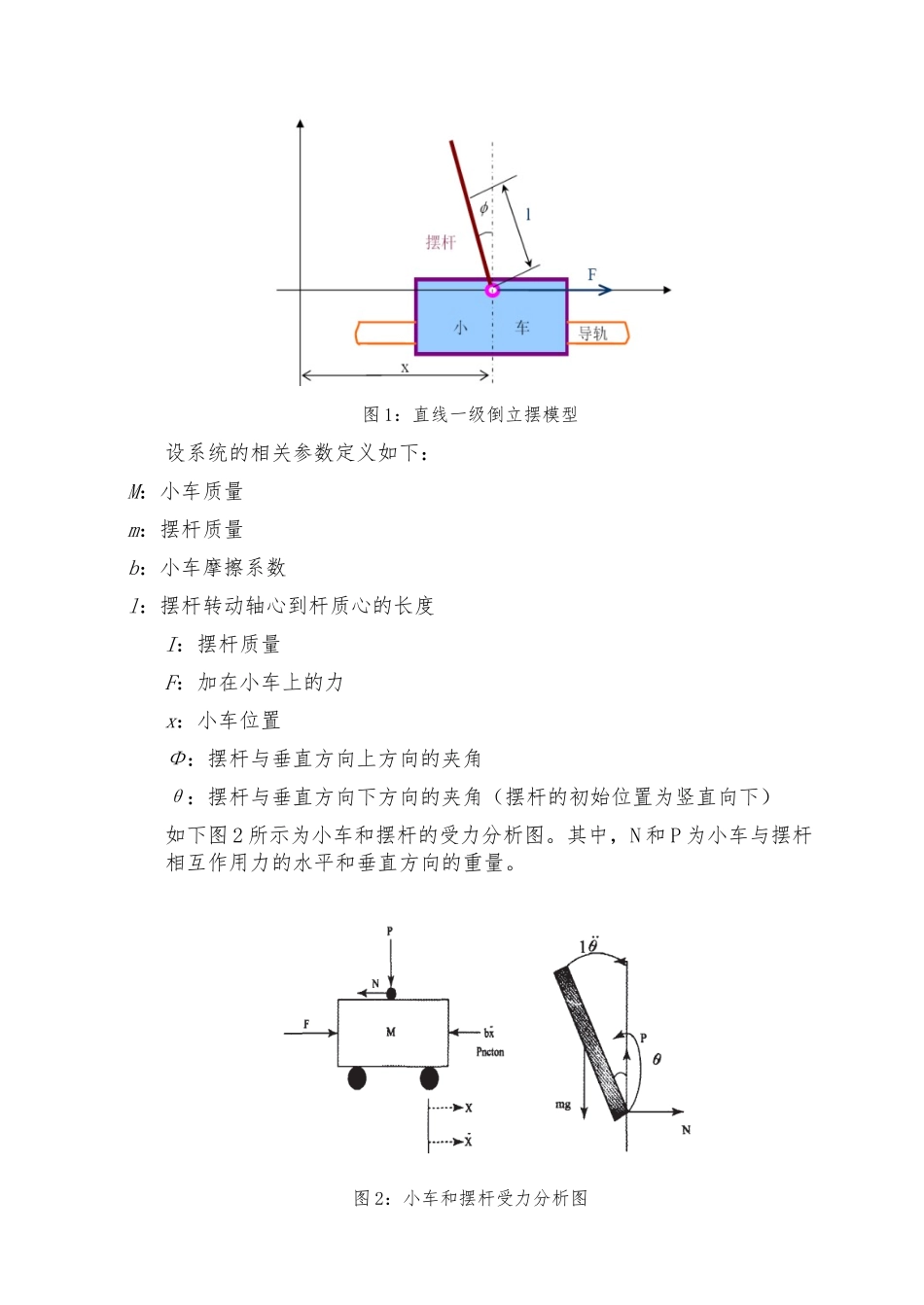
1 微分方程的数学模型在忽略了空气阻力和各种摩擦力之后,可将直线一级倒立摆系统抽象成小车和匀质杆组成的系统,如图 1 所示:图 1:直线一级倒立摆模型设系统的相关参数定义如下:M:小车质量m:摆杆质量b:小车摩擦系数l:摆杆转动轴心到杆质心的长度I:摆杆质量F:加在小车上的力x:小车位置Φ:摆杆与垂直方向上方向的夹角θ:摆杆与垂直方向下方向的夹角(摆杆的初始位置为竖直向下)如下图 2 所示为小车和摆杆的受力分析图
其中,N 和 P 为小车与摆杆相互作用力的水平和垂直方向的重量
图 2:小车和摆杆受力分析图应用牛顿方法来建立系统的动力学方程过程如