一种高效波动推动方式的讨论与其机器人平台的开发设计说明书 海洋航行器的运动是依靠流体的反作用力实现的,当代海洋航行器的主流动力装置是螺旋桨,螺旋桨扰动流体产生周向诱导速度和轴向诱导速度
有用功率是轴向诱导速度产生的,相当一部分的能量引起了流体的周向转动做了无用功
波动推动是一种高效的推动方式,设计采纳一种波动实验装置测量波动鳍在不同波速,波频以与波幅状态下产生的推力大小与推动的效率,根据实验结构绘制出效率曲线,得出最高效率对应的波幅波长与波动速度应用于实际的航行器平台
作品是一种波动推动装置,通过摆动杆有序的摆动形成杆组的波动,进而产生推力
推动机理是波动鳍产生的行进波与水相互作用产生推力,其对流体的扰动小,产生的噪声低,绿色环保;实验测得低速条件下推动效率高于螺旋桨
____徐文华 ; : ; :xwh625163
讨论背景与现状介绍1
1 研制背景与意义我们知道燃油消耗是远洋船舶的主要运营成本之一,因此讨论一种新型的高效水中推动方式来降低能耗有十分重要的意义,同时也符合现在节能减排的大趋势
海洋中的水生生物经过漫长的自然进化,使得它们的推动方式拥有极高的效率与灵活性
目前广泛应用的水下航行器基本都是采纳螺旋桨推动
由于在螺旋桨尾部的水流分离、漩涡多、气泡大等原因造成明显的能量损失,其推动效率只能达到 40%;而仿生推动效率可以达到 80%以上
仿生水下游动的高机动性,高效率,以与低噪声、对环境扰动小等优点符合节能减排,绿色环保的社会进展需要
本作品是在系统讨论了鳍波动推动方式的基础上制作的,在满足水中航行器的各种功能的前提下大大提高了机器鱼的推动效率,达到了节能的效果
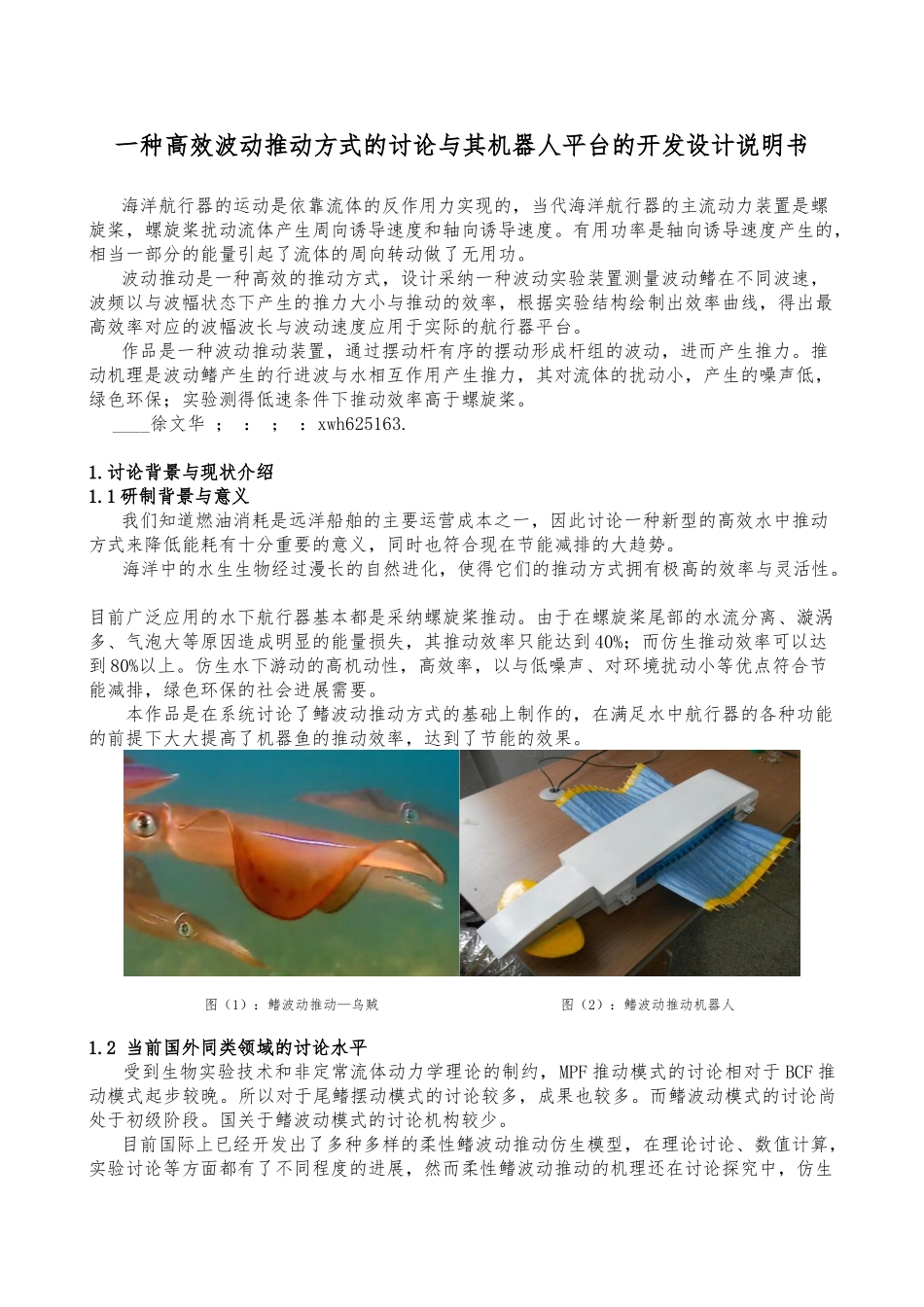
图(1):鳍波动推动—乌贼 图(2):鳍波动推动机器人1
2 当前国外同类领域的讨论水平 受到生物实验技术和非定常流体动力学理论的制约,MPF 推动模式的讨论相对于 BCF 推动模式起步较晚