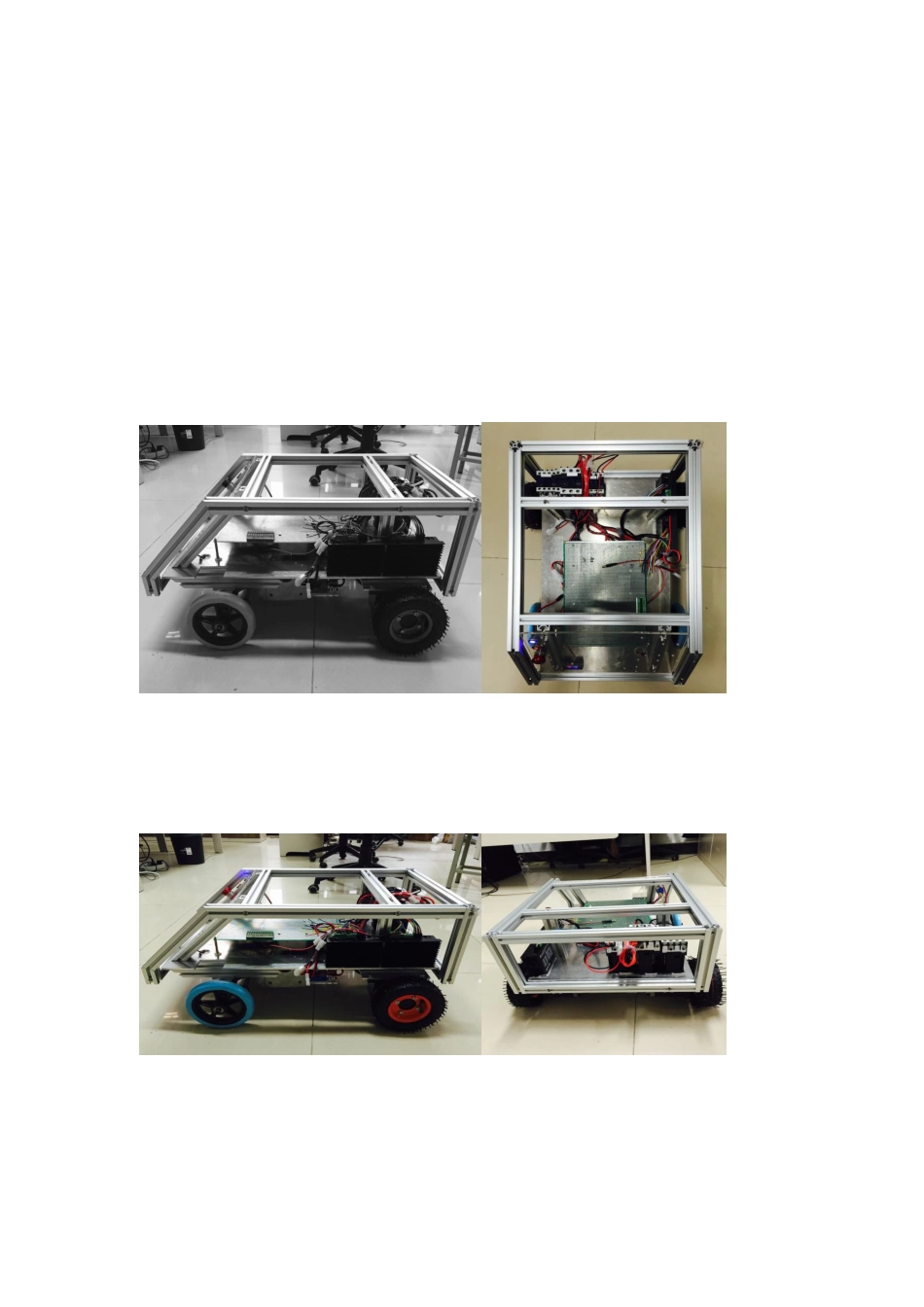
智能 AGV 小车计划书产品简介AGV 小车指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以与各种移载功能的运输车,工业应用中不需驾驶员的搬运车,以可充电之蓄电池为其动力来源
一般可通过电脑来控制其行进路线以与行为,或利用电磁轨道(electromagnetic path-following system)来设立其行进路线,电磁轨道黏贴於地板上,无人搬运车则依靠电磁轨道所带来的讯息进行移动与动作
本项目设计的 AGV 小车可以非常方便地与其它不同的物流系统实现自动连接,例如 AS/RS(自动化立体仓库/存入取出系统)、自动积放链、各种缓冲站、升降机和机器人等;从而实现在工作站之间对物料进行跟踪;按计划输送物料并有执行检查记录;对输送进行确认;与生产线和库存管理系统进行网络在线连接以向工厂或车间管理系统提供实时物流信息
在 AGV 运输物料过程中,由于 AGV 按固定规划路径行驶,不易与其它加工设备或其他障碍物碰撞,很少甚至没有导致产品或生产设备的损坏
AGV 小车通过安装地面电缆、磁导航带或其他不构成障碍的地面导引物引导,方便
小车中 AGVS 系统具有极高的可靠性
AGVS 是由若干台 AGV 小车组成,当一台 AGV 损坏无法工作时,其它 AGV 的生产效率不受影响并可以保持高度的系统可调度性
AGV 小车采纳蓄电池作为动力来源,既节约能源又保护环境
AGV 小车的充电和驱动系统耗能少,能源利用率高,并且 AGV 工作噪音低对制造和仓储环境没有不良影响
项目实施过程,通过分组分工与各研发阶段分期实施完成
柯昌权同学在导师指导下负责整体规划和过程实施;清同学主要进行市场调研和数据分析,确定 AGV 小车设计功能和成本核算;杜永康、延同同学基于机电一体化技术专业知识,完成 AGV 小车硬件结构搭建;团体进行基于自动化传感检测技术和智能控制算法,完成