题目:基于单片机的四旋翼飞行器的设计第一章 引 言1
1 研究的背景与意义随着当今社会日益信息化和智能化,人们对于如何轻量化、便携化获取信息的需求日益增加,通过四旋翼飞行器来更为直观有效地观察周围、获取信息已经在货物运输、监控安保、抗震救灾等多方面投入使用,并取得较为良好的效果
四旋翼飞机由于起飞和着陆的空间需求较小,在有障碍物的密集环境下的高操纵能力,以及保持飞机姿态的能力,在民用和军用领域都有广泛的应用[1]
由于四旋翼飞机具有垂直升力、承载飞行、控制方便等特点,引起社会各个层次日益广泛的应用[2]
由于姿态的改变将引起姿态的变化,故控制部分主要包括姿态的控制和位置的控制两个方面
通常情况下人们使用经典的 PID 算法来控制飞行姿态,进一步控制飞行的位置,从而达到稳定飞行的目标
2 四旋翼飞行器概述四旋翼飞机最早出现在 20 世纪 80 年代,但由于当时社会生产力不足以及科学技术水平较低,还没有开发出相应的产品
因为当时电子元器件和相关制造技术的限制,绝大多数的飞行器产品仍处于实验测试阶段,并没有真正投入生产应用
二十一世纪初,随着微电子器件、芯片制作工艺的发展,飞行运动原理及数学建模和自动控制技术的不断发展和进步,在实际应用平台上运用了更加先进和稳定的控制算法
这些程序命令由微控制器进行分析,控制变量被应用到相应的执行机制中
旋翼机控制技术的显著成就,推动了飞机商业化、产业化的研究方向,在社会各个领域均具有广阔的应用前景
四旋翼飞行器是一种在三维空间中进行飞行,完成指定任务的机器,具有六个活动自由度
通过控制四台电机的转速,实现飞行姿态的控制,实现平稳飞行的要求[4]
基本的飞行姿态可以实现,如向前、向后、平移等
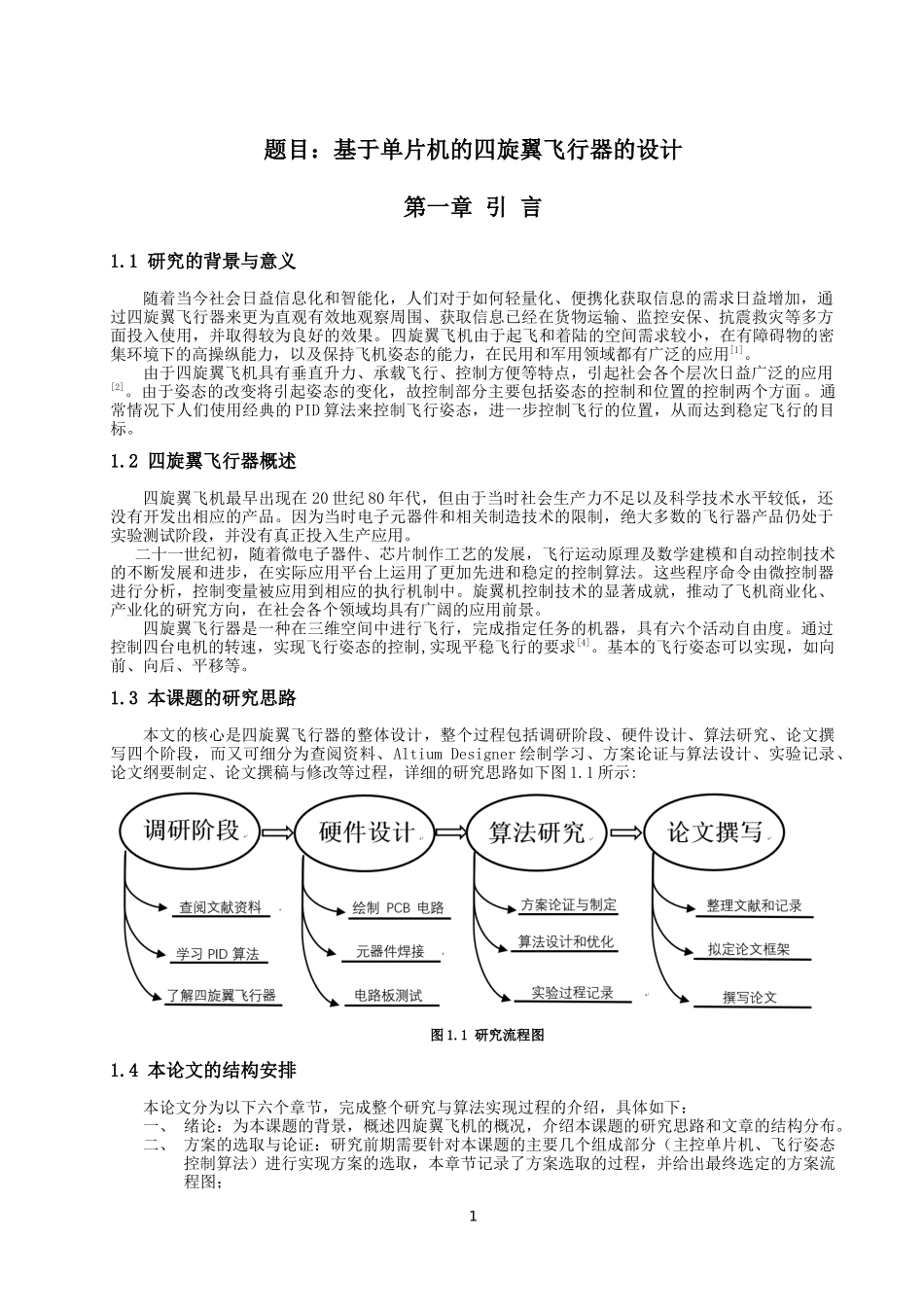
3 本课题的研究思路本文的核心是四旋翼飞行器的整体设计,整个过程包括调研阶段、硬件设计、算法研究、论文撰写四个阶段,而又可细分为查阅资料、Alti