课程作业曲柄摇杆优化设计:宋*学号:2012138229班级:20121057三峡大学机械与动力学院得分目录1
曲柄摇杆机构优化设计题目要求 1
课题描述 23
数学模型的建立 3
1 设计变量的确定 3
2 约束条件的建立 3
3 目标函数的建立 6
数学模型的建立 8
用 matlab 优化计算程序及分析讨论 85
1 讨论及结果分析 9
程序代码过程 116
参考文献 10小结 121
曲柄摇杆机构优化设计题目要求要求设计一曲柄摇杆机构,当曲柄由 p 转到 p+90
时,摇杆的输出角实现如下00给定的函数关系:2/、屮二屮+(P—P)2(1)03 兀 0式中 P 和屮分别为对应于摇杆在右极限位00置时曲柄和摇杆的位置角,它们是机架杆 14为原线逆时针度量的角度,见图 1
要求在该区间的运动过程中的最小传动角不得小于 45°,即:Y>[Y]二 45°min通常把曲柄的长度当成单位长度,即1]=1
另外,根据机构在机器中的许可空间,可以适当预选机架杆的长度,现取l4=5
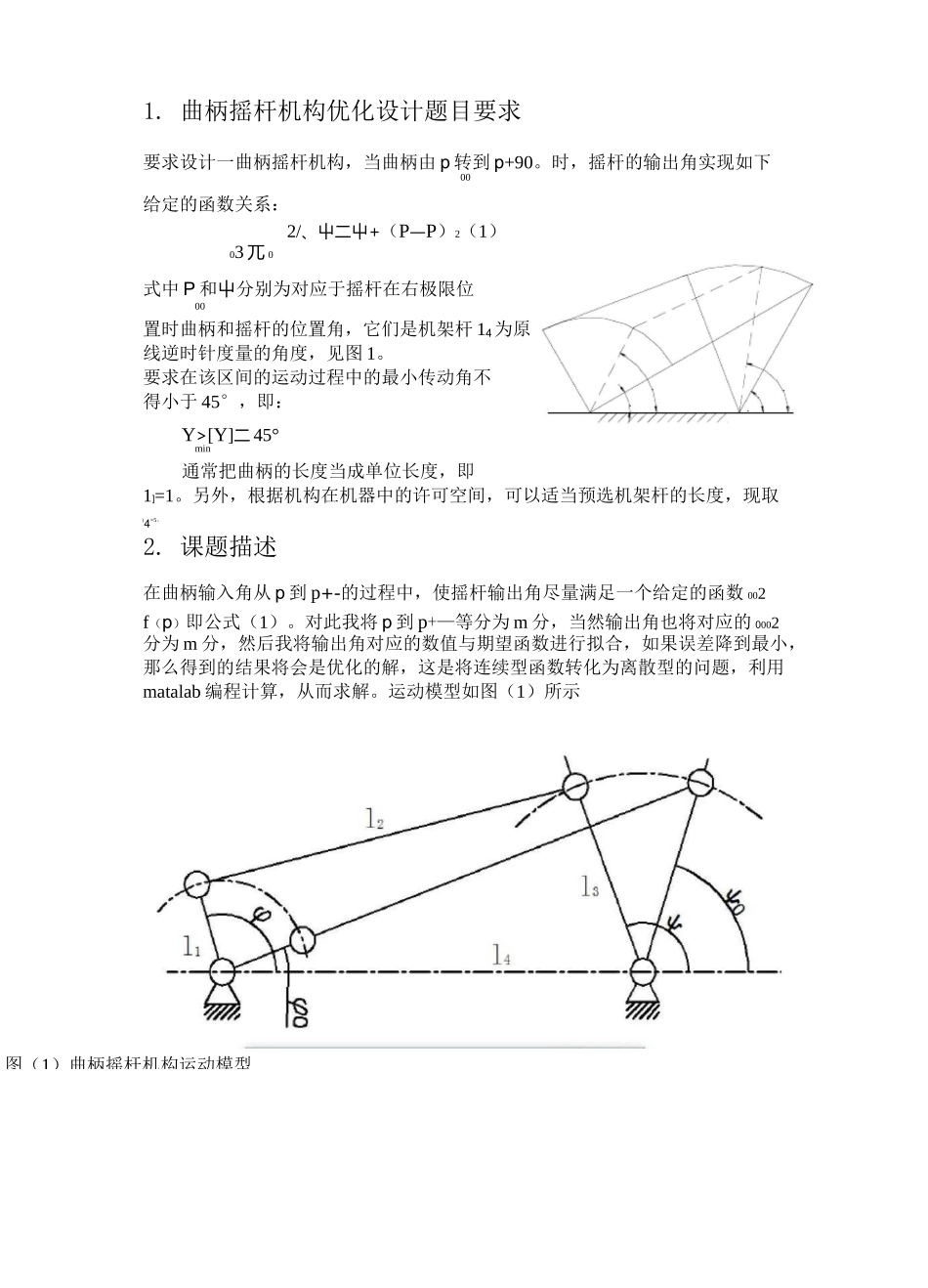
课题描述在曲柄输入角从 p 到 p+-的过程中,使摇杆输出角尽量满足一个给定的函数 002f(p)即公式(1)
对此我将 p 到 p+—等分为 m 分,当然输出角也将对应的 0002分为 m 分,然后我将输出角对应的数值与期望函数进行拟合,如果误差降到最小,那么得到的结果将会是优化的解,这是将连续型函数转化为离散型的问题,利用matalab 编程计算,从而求解
运动模型如图(1)所示图(1)曲柄摇杆机构运动模型2)3)3
数学模型的建立3
1 设计变量的确定定义:设计变量是除设计常数之外的基本参数,在优化设计过程中不断地进行修改、调整、一直处于变化的状态,这些基本参数都叫做设计变量
对于本课题,设计常量为 l,l 长度,分别为 1 和