统设计,如图 1-1
大I左彳咅汗―®下LS3 上限上当吸拄大球时,活窒未达/到下隈忖直 It■駝不动作LS2 下限厂 r 左LS5[~右殴第 1 章引言1
1 大小球分拣传送机械控制系统设计内容简介学院此次安排我们进行了为其两周的机电传动课程设计实习,对我们即将进行毕业设计是很有益处的
这学期我们学习了机电传动控制课程,此次实习主要是对课本中的知识进行实践,比如继电器--接触器控制和可编程控制器控制等重要章节更是练习紧密
让我们把课本知识很好的使用于实践中去,有助于总体实力的提高
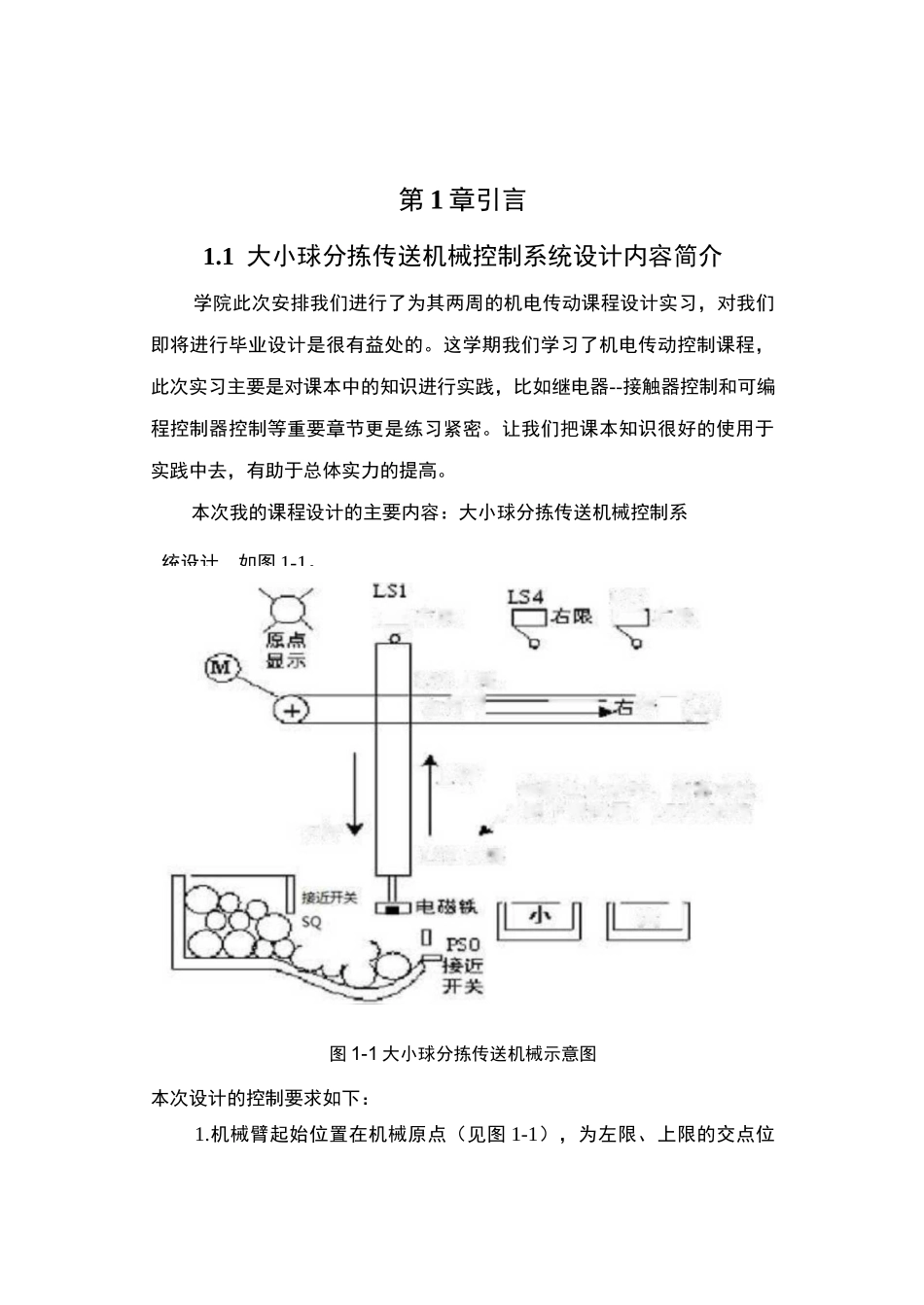
本次我的课程设计的主要内容:大小球分拣传送机械控制系图 1-1 大小球分拣传送机械示意图本次设计的控制要求如下:1
机械臂起始位置在机械原点(见图 1-1),为左限、上限的交点位置
有启动按钮和停止按钮控制运行,按下设备停止按钮后机械臂必须回到原点
3•启动后,机械臂动作顺序为:下降一吸球一上升(至上限)-右行(至右限)一下降一释放一上升(至上限)一左行返回(至原点)
机械臂有形式有小球右限(LS4)和大球右限(LS5)之分;下降时,当电磁铁压着大球时,下限开关 LS2 断开(=“0”;压着小球是,下限开关 LS2 接通(=“1”1
2 大小球分拣传送机械控制系统功能分析分拣大小球的控制功能要求为:1
原位:机械臂原始状态为左上角原位处,即上限开关 LS3 及左限开关 LS1 压合,同时机械臂处于有磁状态状态和球槽内有球(接近开关 PS吸合),这时原位显示亮,表示准备就绪
2•按下启动按钮 SB1 后,机械臂的电磁铁断磁,机械臂下降,接近开关 SQ 闭合后后机械臂会碰到球,接着电磁铁加磁
如果同时碰到下限开关 LS2,则一定是小球;如果此时未碰到下限开关 LS2,则一定是大球
3•机械臂吸住球后就提升,碰到上限开关 LS3 后就右行
如果是小球,则右行到 LS4 处;如果是大球,则右