以 SENSORI 为例,当传感器检测到信号时,即 SENSORI 为高电平,光电耦合器内部发光二极管导通(发光),由于 VDDH 电压为十 5V,与 TTL 电平兼容,输出端的光敏晶体管导通,传感器监测到的信号传给了单片机
作为开关量的控制,一般不将信号直接连接到 I/O 口上,在实际设计中,在光隔的输出端和 CPU 的 I/O 口之间加了 74LS244 以作为信号的缓冲,增加信号的稳定性
由于传感器自身响应时间约为 lms,因此在本控制系统中,其电平转换延时(约为 3us)和增加缓冲器后的延时时间(约为 18ns)可以忽略,并不影响控制系统的性能
这在其他系统中需特别注意,特别是在高速系统设计中,信号的完整性可能会受到影响
在本控制系统中,根据具体的实际需求,选用的是中沪公司的 Y2V 型光电传感器,其主要特点如下:(l)检出彩色标志分辨率高;(2)光源备有红色、绿色、蓝色单光源及红绿双光源:(3)受光与稳定指示灯可目测标志检出的稳定范围;(4)放大器内藏,响应速度可达 lms:(5)改变电源极性即可改变亮动/暗动输出状态;(6)备有 DC12 一 24V 和 AC220V 两种工作电源系列;(7)采纳最新 ASIC 电路和 sMT 表面安装工艺,互换性好,和进口同类产品可互换使用
由于是脉冲式光电传感器,其信号输出为开关量信号,因此控制起来相对较容易,减少了整体硬件电路的开销
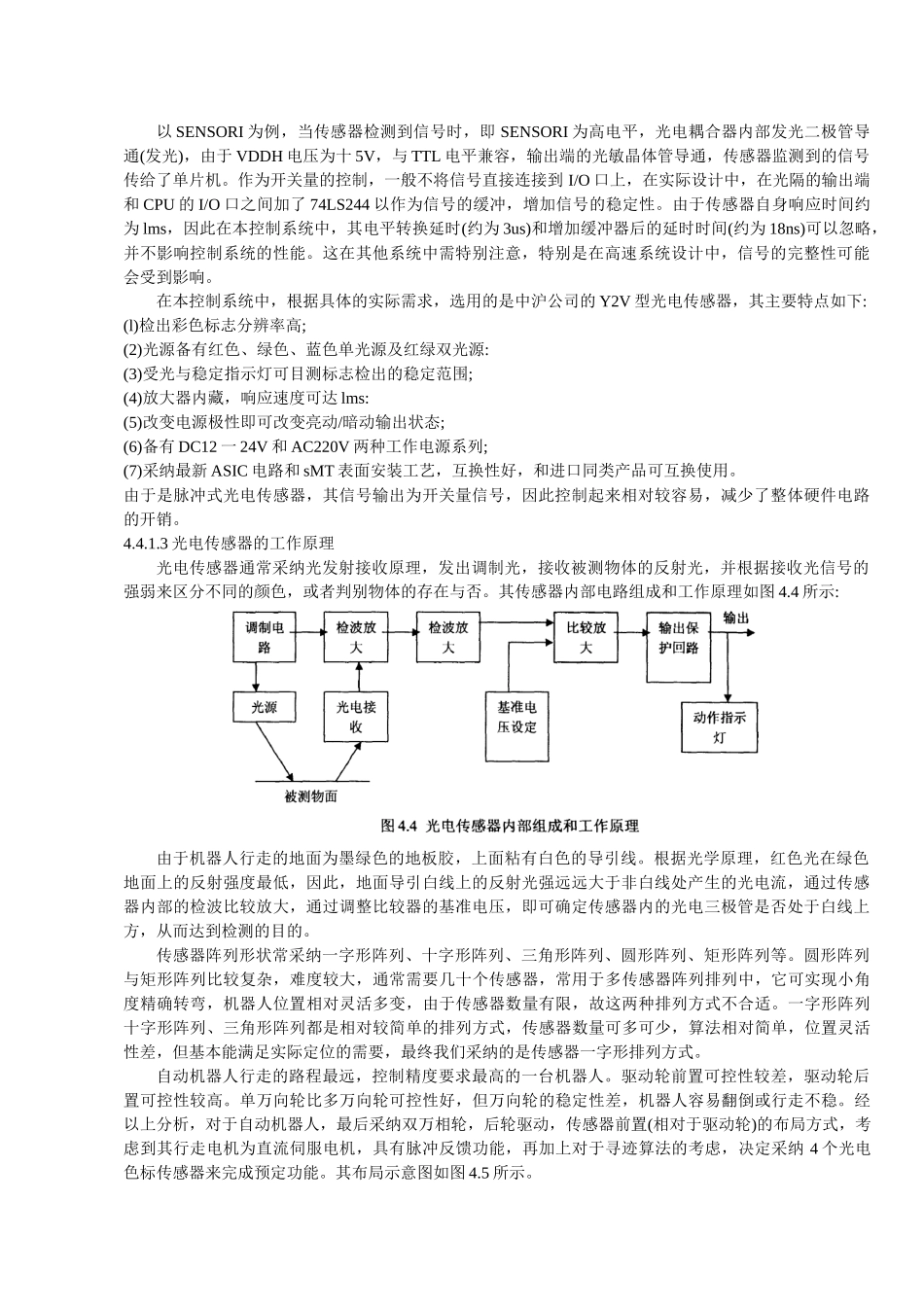
3 光电传感器的工作原理光电传感器通常采纳光发射接收原理,发出调制光,接收被测物体的反射光,并根据接收光信号的强弱来区分不同的颜色,或者判别物体的存在与否
其传感器内部电路组成和工作原理如图 4
4 所示:由于机器人行走的地面为墨绿色的地板胶,上面粘有白色的导引线
根据光学原理,红色光在绿色地面上的反射强度最低,因此,地面导引白线上的反射光强远远大于非白线处产生的光电流,通过传感器