旋翼飞机进展的系统方法杰弗里·坎贝尔 RMC 加拿大 Kingston s25184@rmc
ca杰里米·汉密尔顿 RMC 加拿大 Kingston sm0962@rmc
ca穆罕默德 Iskandarani RMC 加拿大 Kingston s25492@rmc
ca悉尼 Givigi 小 RMC 加拿大 Kingston sidney
givigi@ rmc
ca摘要:本文讨论了一个旋翼飞机自动驾驶仪的设计和实施
无人驾驶飞行器(UAV)正变得越来越重要,在监视行动
随着越来越多的飞机在一个地点工作,他们利用大量的通信带宽
提供无人机具有一定的自主权,缓解这个问题
我们的自动驾驶仪设计允许无人机起飞,中转,同时接收从一个位置到另一个位置数据的饲料,和土地在所需的位置
从的 OptiTrack 光学阵列得到的位置数据,以模拟一个 GPS 饲料被输送到旋翼
此系统的最终应用能够操作多个自治飞机在演唱会中,为了讨论他们的行为和交互
关键词:旋翼直升机自动驾驶仪;线性二次调节;无人驾驶1引言本文探讨了采纳系统工程方法为旋翼无人机飞机的自动驾驶控制器的开发和实施
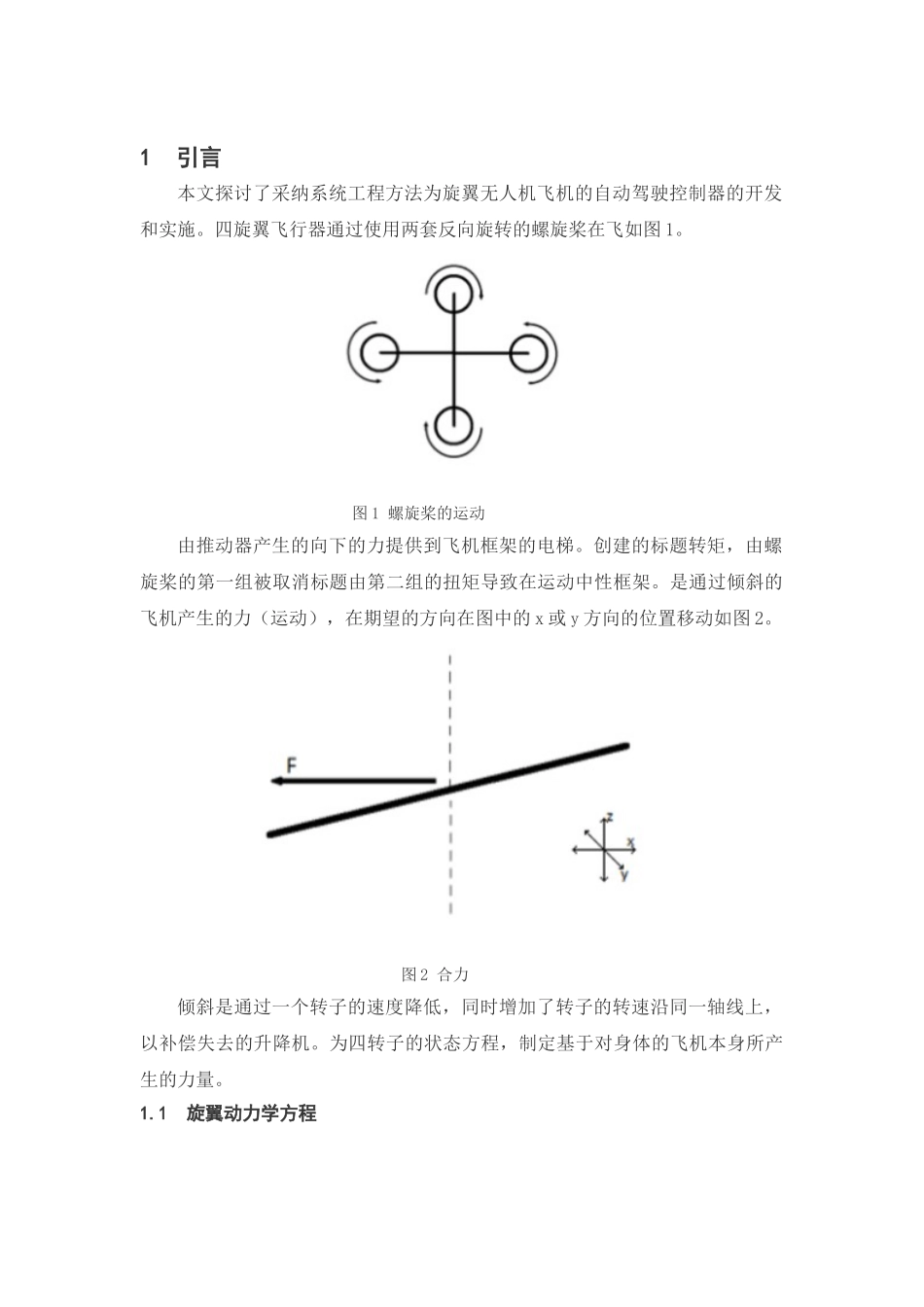
四旋翼飞行器通过使用两套反向旋转的螺旋桨在飞如图 1
图 1 螺旋桨的运动由推动器产生的向下的力提供到飞机框架的电梯
创建的标题转矩,由螺旋桨的第一组被取消标题由第二组的扭矩导致在运动中性框架
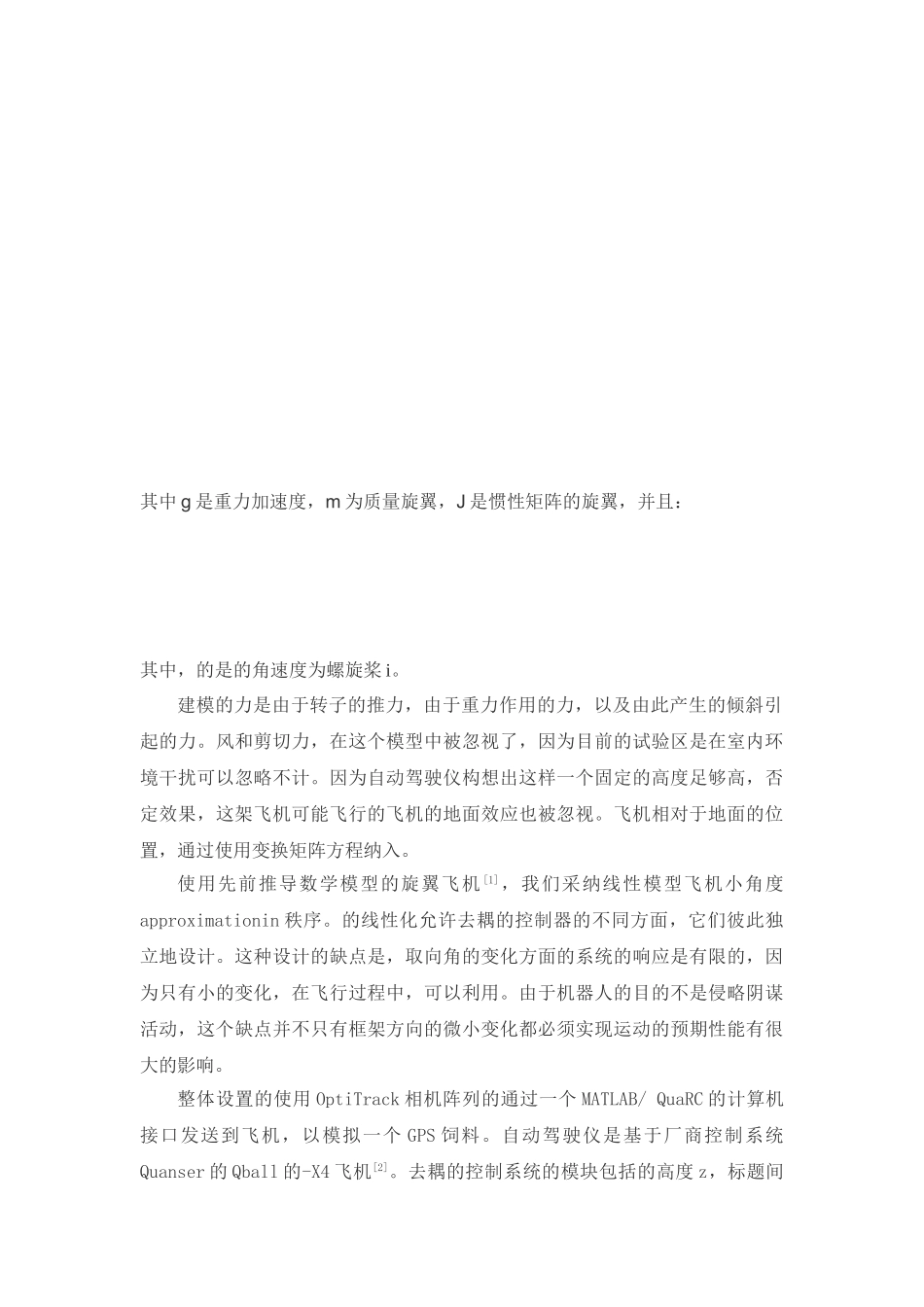
是通过倾斜的飞机产生的力(运动),在期望的方向在图中的 x 或 y 方向的位置移动如图 2
图 2 合力倾斜是通过一个转子的速度降低,同时增加了转子的转速沿同一轴线上,以补偿失去的升降机
为四转子的状态方程,制定基于对身体的飞机本身所产生的力量
1 旋翼动力学方程其中 g 是重力加速度,m 为质量旋翼,J 是惯性矩阵的旋翼,并且:其中,的是的角速度为螺旋桨 i
建模的力是由于转子的推力,由于重力作用的力,以及由此产生的倾斜引起