基于 STM32F4 的姿态解算系统摘要:本实验主要利用的基于 STM32F4 开发板上 MUP6050 陀螺仪加速度计来做四元素的更新和四元素的姿态解算系统,开发平台为 keil uvision5
主要实现 MPU6050 自带数字运动处理 DMP 的四元素与自己编写的三子样旋转矢量算法对比的目的
将 MPU6050 输出的原始数据和姿态解算数据通过串口上传到四轴上位机进行 3D 仿真,和用 LCD 屏进行数据的实时显示,并且用一个 LED 灯显示系统的运行和一个开关控制数据是否上传上位机
程序是在 UCOSIII 操作系统中实现,建立了一个定时器,五个任务
定时器实现四元素更新的三子样算法和姿态解算;开始任务负责创建任务;任务一实现开关对数据上传控制;任务二实现上传 MPU6050 输出数据和自己解算姿态到上位机;任务三实现 MPU6050 的四元素读取并显示到 LCD上;任务四负责 LCD 数据和字符的显示
关键字:MPU6050;四元素;姿态解算;UCOSIII1 引言现在 MEMS 陀螺仪和加速的计价格便宜,精度虽不如光纤和激光陀螺,但是它以价格便宜体积重量小等优势占据一定的地位,它应用的领域主要在民用手机导航小型飞行器当中
基于 MEMS 惯性元件的导航可应用于个人的导航和小型飞行器的导航,讨论 MEMS 陀螺导航具有一定的有用价值
本实验主要利用的基于 STM32F4 开发板上 MUP6050 陀螺仪加速度计来做四元素的更新和四元素的姿态解算,开发平台为keil uvision5,将数据通过串口上传到四轴上位机进行 3D 仿真,并用 LCD 屏进行数据的实时显示
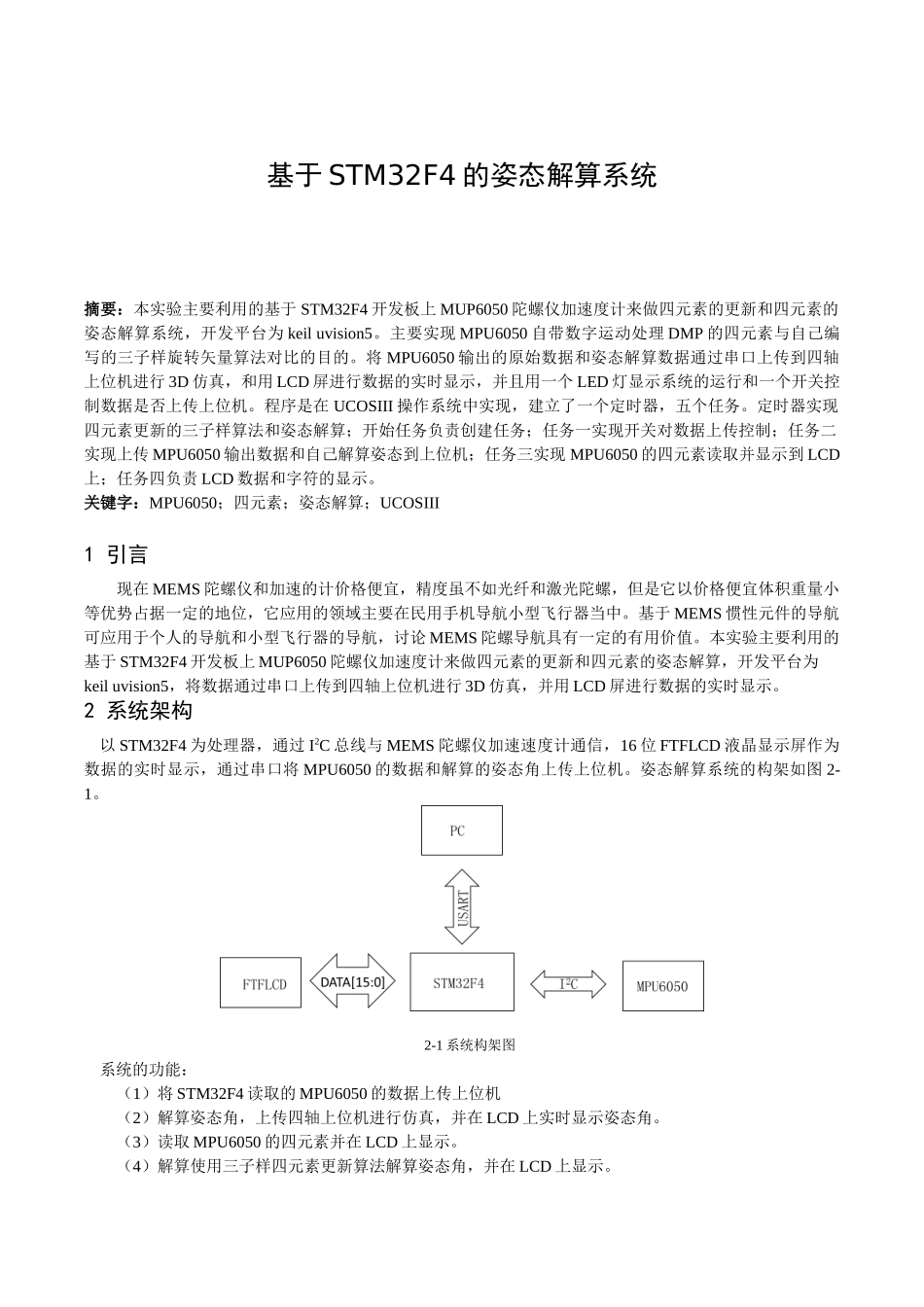
2 系统架构以 STM32F4 为处理器,通过 I2C 总线与 MEMS 陀螺仪加速速度计通信,16 位 FTFLCD 液晶显示屏作为数据的实时显示,通过串口将 MPU6050 的数据和解算的姿态角上