摘要本设计主要有单片机模块、传感器模块、电机驱动模块以及电源模块组成,小车具有自主寻迹得功能
本次设计采纳 STC 公司得 89C52 单片机作为控制芯片,传感器模块采纳红外光电对管与比较器实现,能够轻松识别黑白两色路面,同时具有抗环境干扰能力,电机模块由 L298N 芯片与两个直流电机构成,组成了智能车得动力系统,电源采纳 7、2V 得直流电池,经过系统组装,从而实现了小车得自动循迹得功能
关键词 智能小车 STC 89 C 52 单片机 L2 98N 红外光对管1绪论随着科学技术得进展,机器人得设计越来越精细,功能越来越复杂,智能小车作为其得一个分支,也在不断进展
在近几年得电子设计大赛中,关于小车得智能化功能得实现也多种多样,因此本次我们也打算设计一智能小车,使其能自动识别预制道路,根据设计得道路自行寻迹
2设计任务与要求采纳 MCS-51单片机为控制芯片(也可采纳其她得芯片),红外对管为识别器件、步进电机为行进部件,设计出一个能够识别以白底为道路色,宽度10mm 左右得黑色胶带制作得不规则得封闭曲线为引导轨迹并能沿该轨迹行进得智能寻迹机器小车
3方案设计与方案选择3
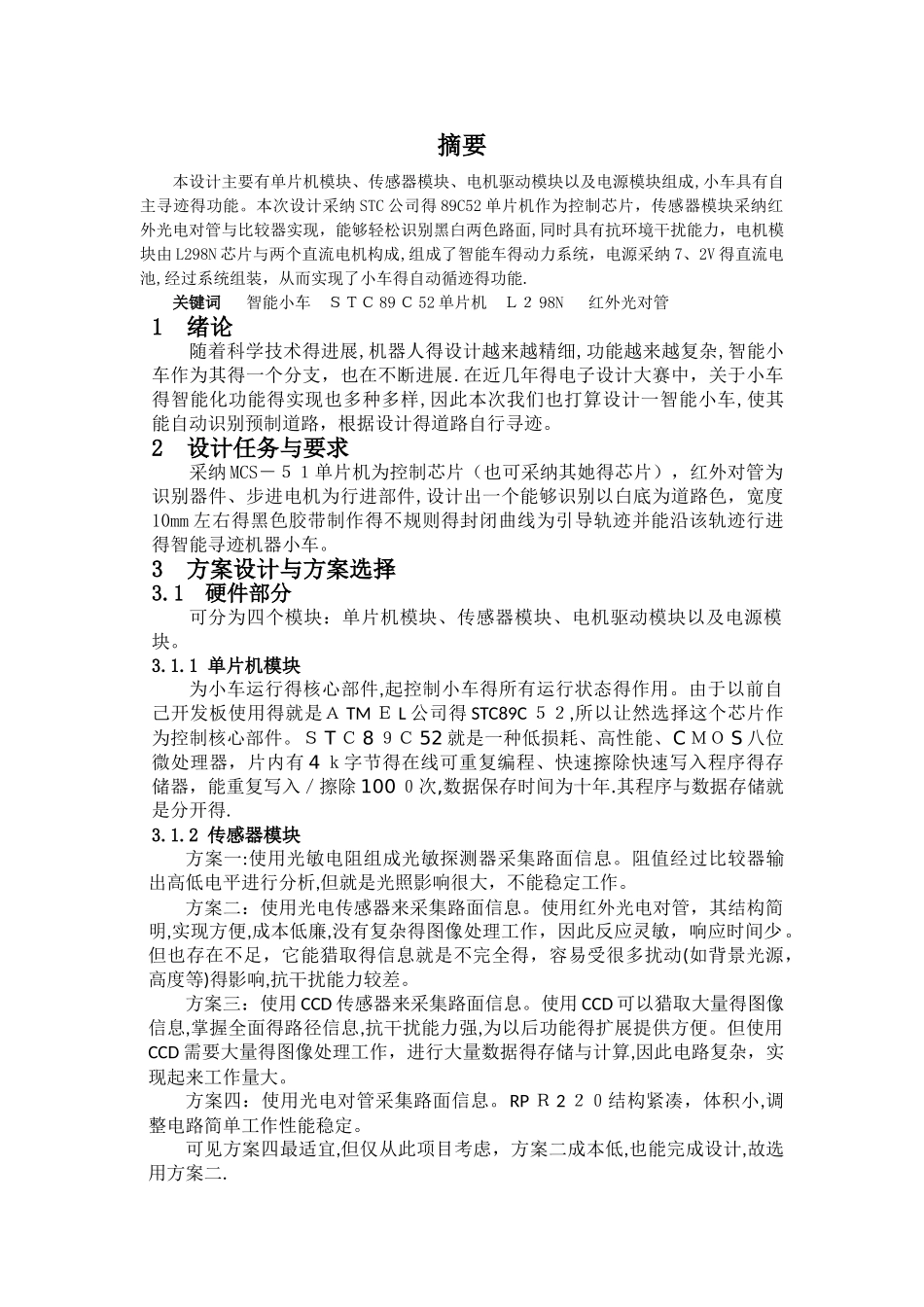
1硬件部分可分为四个模块:单片机模块、传感器模块、电机驱动模块以及电源模块
1 单片机模块为小车运行得核心部件,起控制小车得所有运行状态得作用
由于以前自己开发板使用得就是A TM E L 公司得 STC89C 52,所以让然选择这个芯片作为控制核心部件
S T C 8 9C 52 就是一种低损耗、高性能、C MO S 八位微处理器,片内有 4 k字节得在线可重复编程、快速擦除快速写入程序得存储器,能重复写入/擦除 100 0次,数据保存时间为十年
其程序与数据存储就是分开得
2 传感器模块方案一:使用光敏电阻组成光敏探测器采集路面信息
阻值经过比较器输出高低电平进行分析,但就是光照影