机器人避障问题 摘 要:当今科学技术日益发达,高科技产品尤其就是机器人在我们日常生活中运用得越来越广泛,它能够代替人类完成许许多多得工作,但如何能让机器人自动化得完成人类交给得任务成为设计机器人得关键
我们做此题就就是为了更好得利用机器人为我们提供方便,提高生活质量,若机器人程序设计不当不仅不会给人类带来方便,还很有可能给我们得生活带来更多得麻烦
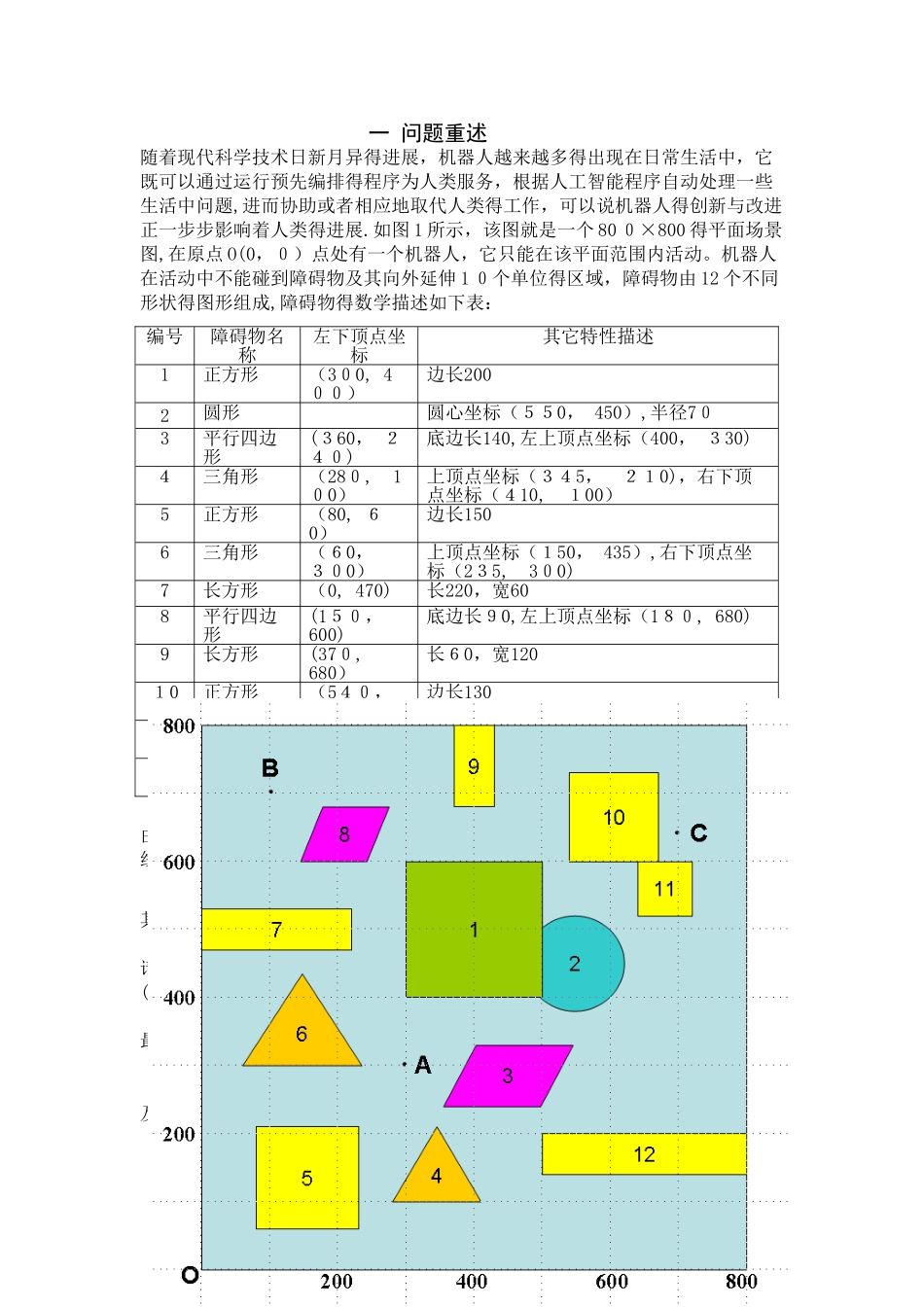
本题中提出了如何让机器人能够自动识别障碍物,保证机器人能够在合理区域行走,并设计出如何能让机器人自动推断最短路程于最短时间下行走路线得问题
所以解决好本题可以为我们得生活提供帮助
本文通过运用两点之间直线最短理论,优化问题,最短路问题,图论,以及运用m a t lab 软件编程及作图得方法,阐述了机器人避障问题得相对优化方案得解决办法,即“两点之间直线最好,转弯半径最小”得理论,通过计算中得比较与选择把四条最短路径都求出了相对最优解,论证了转弯速度不会随着 r 得增加一直增大或减小,而就是有一个最小极点得思想
从而求出了 r,以及最短得时间
问题一,通过对最短路问题得分析,我们很容易分解成线圆结构来求解,然后把可能路径得最短路径采纳穷举法列举出来,最终得出最短路径:O A 最短路径为:47 1、03 7 2O B 最短路径为:8 38、0466O C 最短路径为:1085、753 1O→A→B→C→O 最短路径为:2 8 34、6591问题二,通过建立时间t与 r 得关系式,得出 r 在11、5 0 4 时,从 O 到 A得时间相对最短,最短时间为98、6060 0 4
我们可以利用此篇论文解决生活中实际得问题,在计算时可以节约大量得时间,使机器人又准确又完善得完成我们给定得任务,从而进行拓展,给定区域内任何两个点,我们都可求出其最短路径与走完全程得最快时间
从而可以让机器人帮助我们给家里打扫卫生或设计自动吸尘器等,也可使机器