牛头刨床导杆机构得运动分析目 录1 设计任务及要求……………………………2 数学模型得建立……………………………3 程序框图……………………………………4 程序清单及运行结果………………………5 设计总结……………………………………6 参考文献……………………………………机械原理课程设计任务书(一)姓名 郭娜 专业 机械工程及自动化 班级 机械 0 8 -3 班 学号 0 8 07 10 0 305 一、设计题目:牛头刨床导杆机构得运动分析二、系统简图: 三、工作条件已知:曲柄每分钟转数 n 2,各构件尺寸及重心位置,且刨头导路 x-x 位于导杆端点 B 所作圆弧高得平分线上
四、原始数据导杆机构得运动分析8五、要求:1)作机构得运动简图(A 4 或 A 3图纸)
2)用 C 语言编写主程序调用子程序,对机构进行运动分析,并打印出程序及计算结果
3)画出导轨 4 得角位移,角速度,角加速度得曲线、4)编写设计计算说明书
指导老师:开始日期: 2025 年 7 月 1 0 日 完成日期:2 0 10 年 7 月 1 6日1、 设计任务及要求设计内容导 杆 机 构 得 运 动 分 析单位r/m inmm符号n 2l o 2o 4l o2 Al o4BlBClo4s4数据80642 5 要求(1)作机构得运动简图
(2)用 C 语言编写主程序调用子程序,对机构进行运动分析,动态显示,并打印程序及运算结果
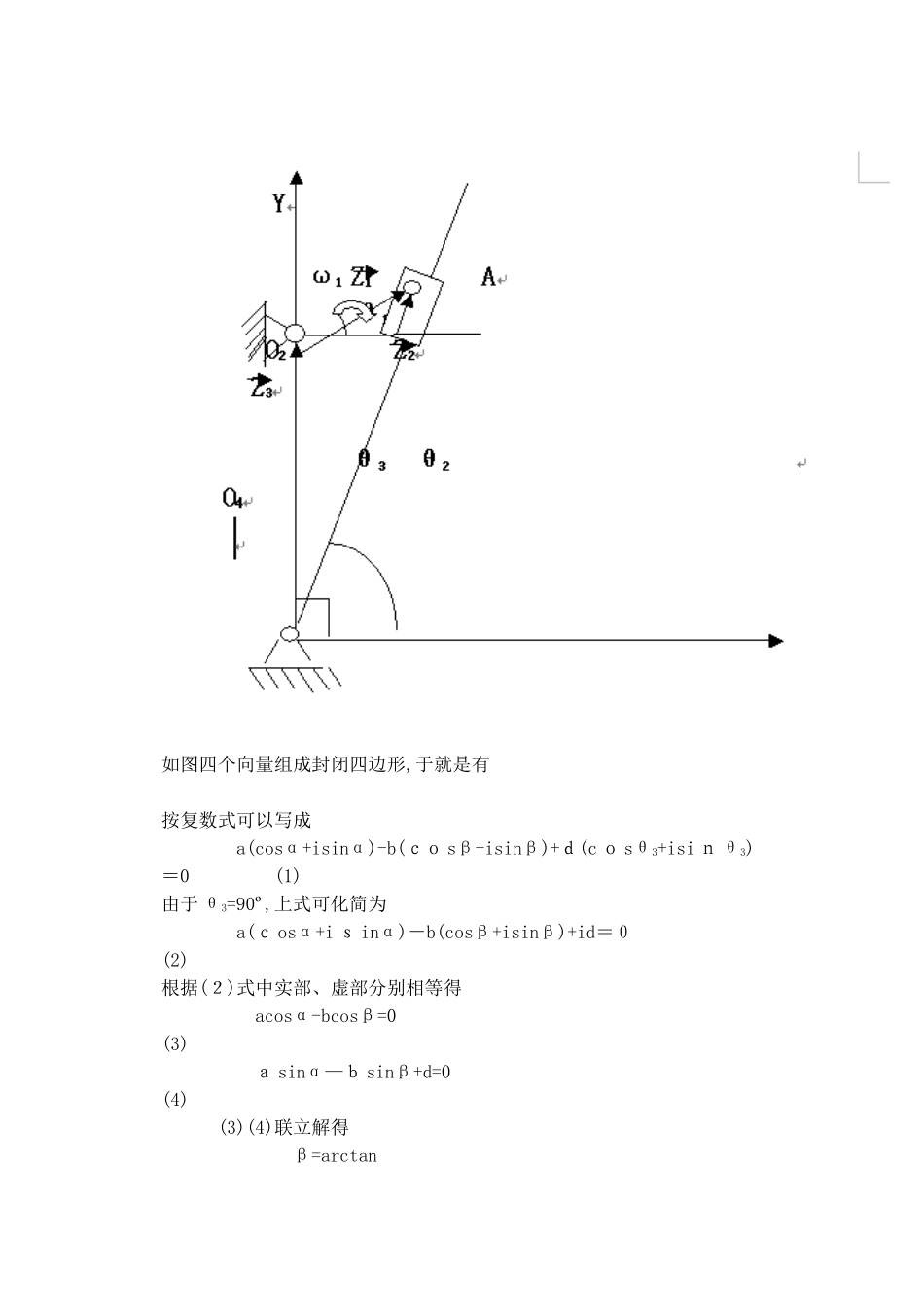
(3)画出导轨得角位移 Ψ,角速度 Ψ’,角加速度Ψ"、(4)编写设计计算说明书、二、 数学模型 如图四个向量组成封闭四边形,于就是有按复数式可以写成a(cosα+isinα)-b(co sβ+isinβ)+d(c o sθ3+isi n θ3)=0 (1)由于 θ3=90º,上式可化简为a(c osα+i s inα)-b(cosβ+isinβ)+id=0 (2)根据(2)式中