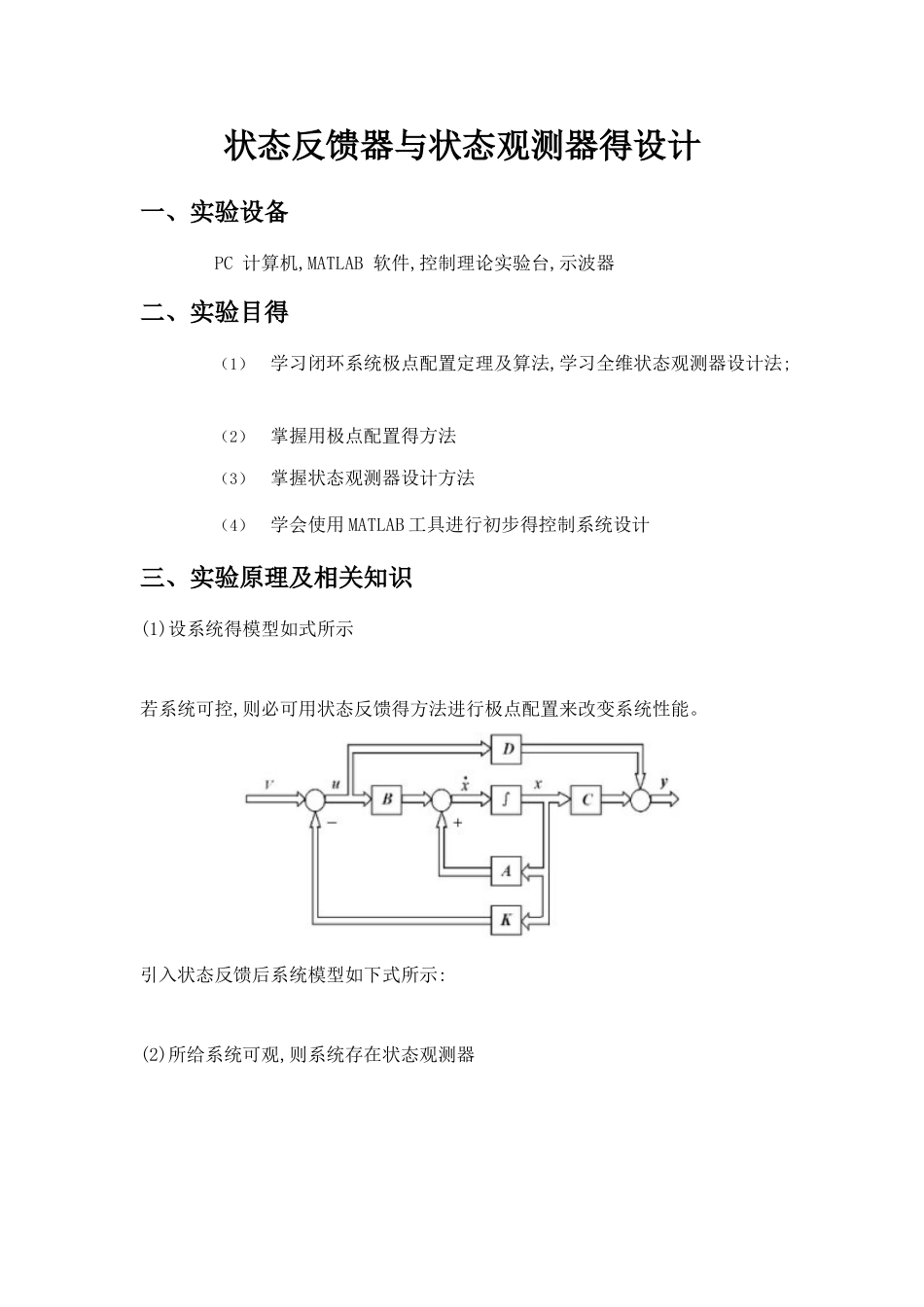
状态反馈器与状态观测器得设计一、实验设备 PC 计算机,MATLAB 软件,控制理论实验台,示波器 二、实验目得 (1)学习闭环系统极点配置定理及算法,学习全维状态观测器设计法; (2)掌握用极点配置得方法 (3)掌握状态观测器设计方法 (4)学会使用 MATLAB 工具进行初步得控制系统设计 三、实验原理及相关知识 (1)设系统得模型如式所示 若系统可控,则必可用状态反馈得方法进行极点配置来改变系统性能
引入状态反馈后系统模型如下式所示: (2)所给系统可观,则系统存在状态观测器 四、实验内容(1)某系统状态方程如下 理想闭环系统得极点为、(1)采纳 Ackermann 公式计算法进行闭环系统极点配置; 代码: A=[0 1 0;0 0 1;4 3 2]; B=[1; 3; 6]; P=[1 2 3]; K=acker(A,B,P) Ac=AB*K eig(Ac)(2)采纳调用 place 函数法进行闭环系统极点配置;代码: A=[0 1 0;0 0 1;4 3 2]; B=[1;3;6]; eig(A)' P=[1 2 3]; K=place(A,B,P) eig(AB*K)'(3)设计全维状态观测器,要求状态观测器得极点为代码:a=[0 1 0;0 0 1;4 3 2];b=[1;3;6];c=[1 0 0];p=[1 2 3];a1=a';b1=c';c1=b';K=acker(a1,b1,p);h=(K)'ahc=ah*c(2)已知系统状态方程为: (1)求状态反馈增益阵 K,使反馈后闭环特征值为[1 2 3];代码:A=[0 1 0;0 0 1;4 3 2];b=[1;3;6];p=[1 2 3];k=acker(A,b,p)Ab*keig(Ab*k)(2)检验引入状态反馈后得特征值与希望极点就是否一致
(3)比较状态反馈前后得系统阶跃响应
代码:A1=[