1 擦窗机器人概述机器人是自动执行工作的机器装置
它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动
它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作
擦窗机器人是一种仿人操作,模仿人工作业的部分动作,具有可持续长时间工作、精确度高、抗恶劣环境的能力,从某种意义上说他是机器进化的产物
随着城市的进展,越来越多的高城建筑纯粹安在大都市中
高层建筑玻璃幕墙的清洗是一种繁重而危险的工作
人工清洗不仅费用高、效率低,而且十分危险
随着机器人技术的进展
出现了各种各样的特种机器人,这为解决高层建筑幕墙的清洗问题提供了一个新思路
由于擦窗机器人在高空中工作,驱动与重量效率比是一个很重要的性能指标
从某种意义上来说擦窗机器人是机器人进化的产物,它是工业以及非产业界的重要生产和服务设备,也是先进制造技术领域不可缺少的自动化装备
在生活生产中,是用机械手可以提高工作的自动化水平和劳动生产率:可以减轻劳动强度、保证擦洗质量、实现安全生产;尤其在高楼层、低安全系数、人工难以达到及对身体有损害的恶劣环境中,他能代替人们工作,意义非常重大
因此,随着玻璃幕墙建筑物的推广,这种擦窗机器人正得到越来越广泛的引用
这种擦窗机器人的专用性强目前仅应用于玻璃表面的清洗,但是未来假如可以应用这种技术并将其稍加改进将会有可能应用于很多领域,因此它具有很广的进展前途
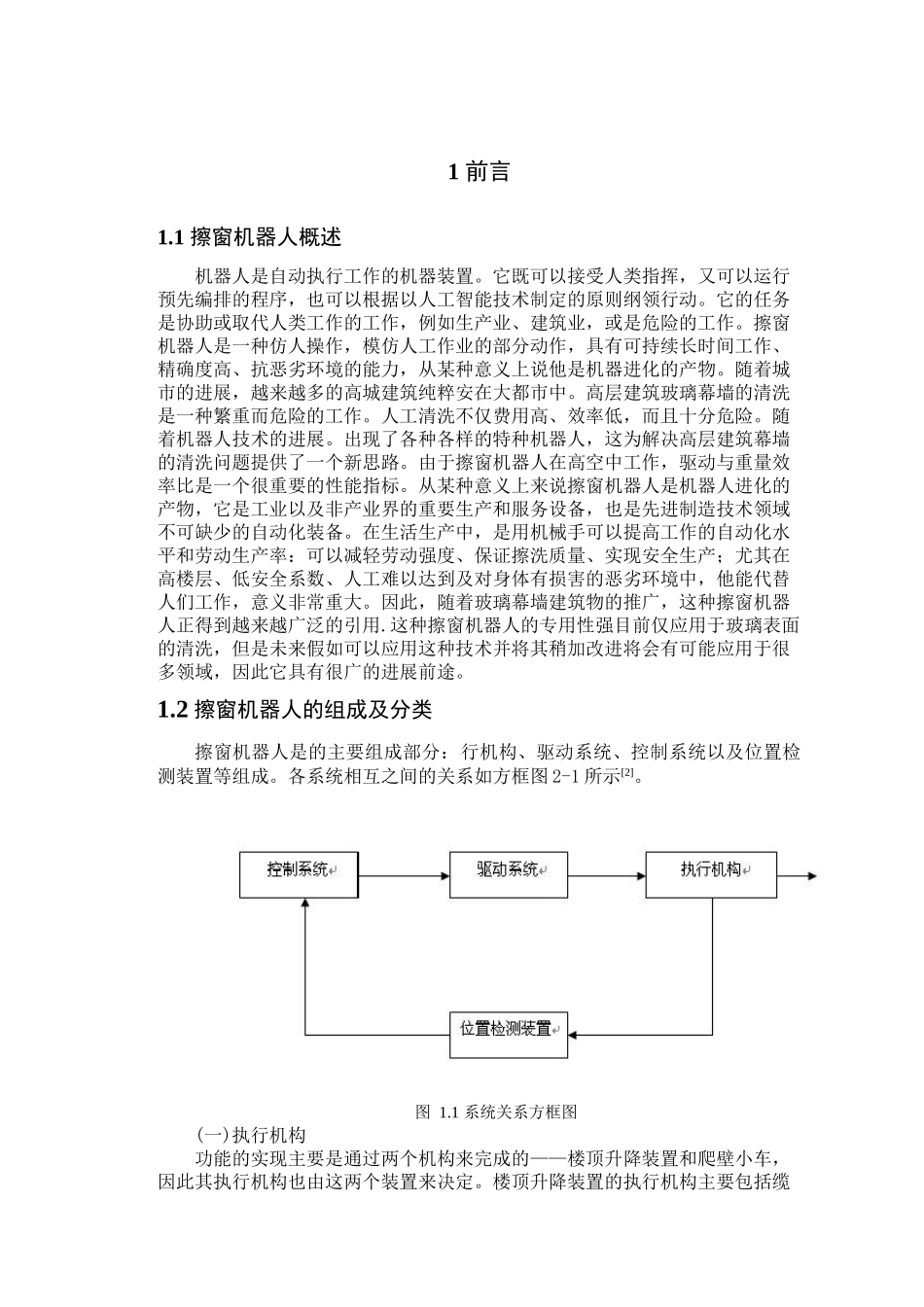
2 擦窗机器人的组成及分类擦窗机器人是的主要组成部分:行机构、驱动系统、控制系统以及位置检测装置等组成
各系统相互之间的关系如方框图 2-1 所示[2]
1 系统关系方框图(一)执行机构功能的实现主要是通过两个机构来完成的——楼顶升降装置和爬壁小车,因此其执行机构也由这两个装置来决定
楼顶升降装置的执行机构主要包括缆绳支架、缆绳、蜗轮蜗杆减速器、导向小车和导轨等部分组