1、当您付费下载文档后,您只拥有了使用权限,并不意味着购买了版权,文档只能用于自身使用,不得用于其他商业用途(如 [转卖]进行直接盈利或[编辑后售卖]进行间接盈利)。2、本站所有内容均由合作方或网友上传,本站不对文档的完整性、权威性及其观点立场正确性做任何保证或承诺!文档内容仅供研究参考,付费前请自行鉴别。3、如文档内容存在违规,或者侵犯商业秘密、侵犯著作权等,请点击“违规举报”。
碎片内容
目 录第一章 引言
2第二章 总体方案的确定
3第三章 硬件设计
1 主电路的设计
2 控制电路的设计
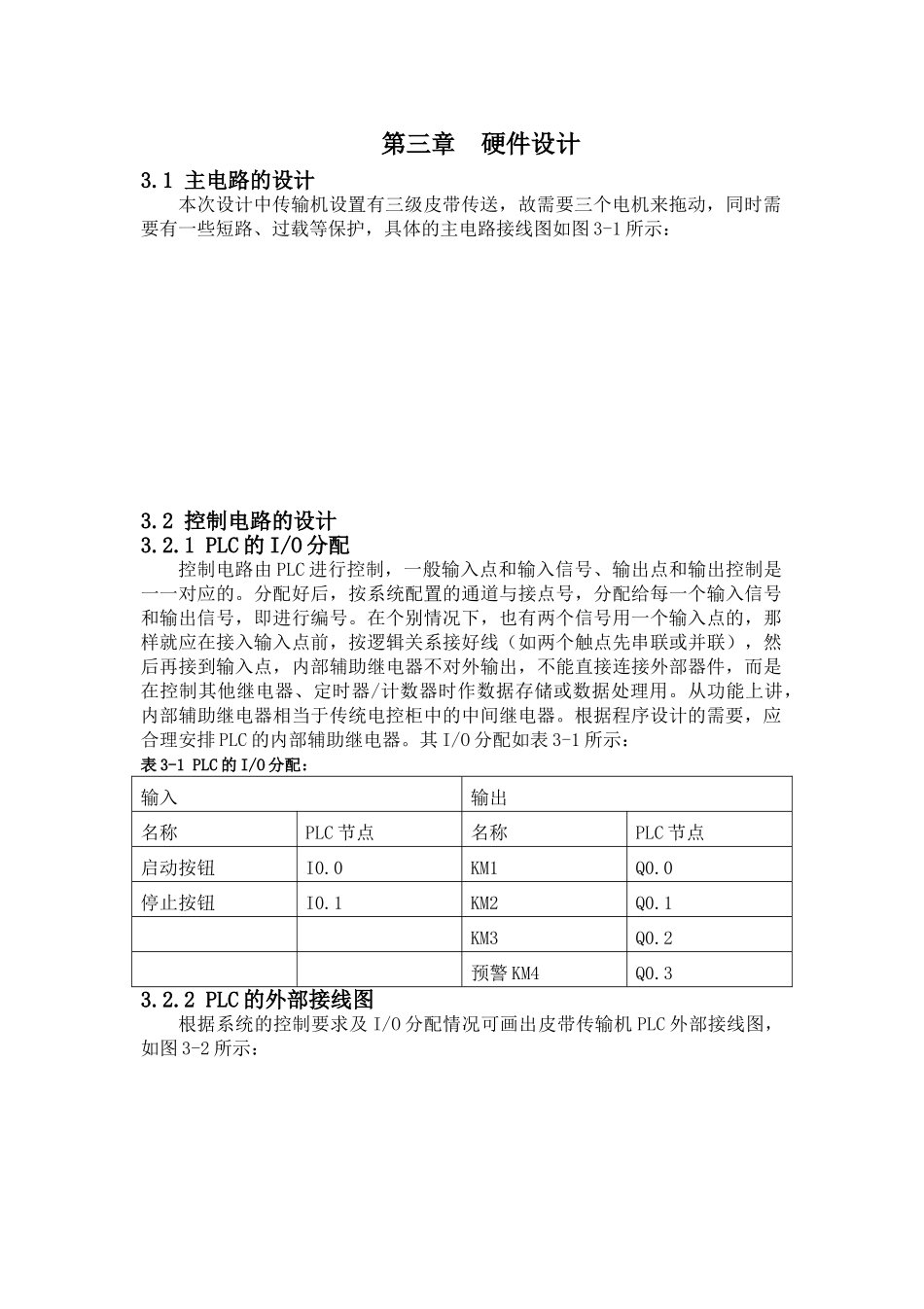
1 PLC 的 I/O 分配
2 PLC 的外部接线图
5第四章 软件的设计
6第五章 总结
10第一章 引言过去的电气控制技术以传统的低压电器元件为基础,以传统的测试方式为手段,形成了以继电—接触器为主的电气控制系统,功能简单,可靠性地,体积庞大,缺乏灵活性与通用性
如今,随着电子信息化的趋势,可编程控制器(PLC)从最初的以替代继电控制功能到现在已经进展成工控领域应用最为广泛地新型自动化的装置,并且与电气控制技术呈现一种相互融合与综合的趋势,在这我认为 PLC 最适合去解决这些问题,因为 PLC 具有通用性强、使用方便、适应面广、可靠性高、抗干扰能力强、编程简单等特点
并且 PLC 在工业自动化控制特别是顺序控制中的方面具有比较突出的优势,因此本次设计基于传统的皮带运输进行改
大量资料供您选择,没有合适的可以联系小二。