RAPID 参考手册指令L 指令 LL AecSet 降低加速度 用途 t当姓理较大负栽肘使用 AccSert^^a 它允许减慢加速度和减速度,使机器人有一个更平滑的运动
孩指令只能在主任务 TJ10B1 中使用'或者 M 果处尸多运动系统,在 M 指 OQ 任务中:基杰范例;AccSrt 的威本范例说明如 b\ 例 I AccSer 50
1i加速度备限制到正常值的 50W
例 2 ArcSet 1, 50;加速度斜线限制到正常值的 50%
项目]AccS et Acc RampAcc;数据类型、aum (敖值)加速度和减速度作为正常值的百分比,1%对应最大如速度
埼大伽 1%&输入值@0%则给出最大加 速度的 20%
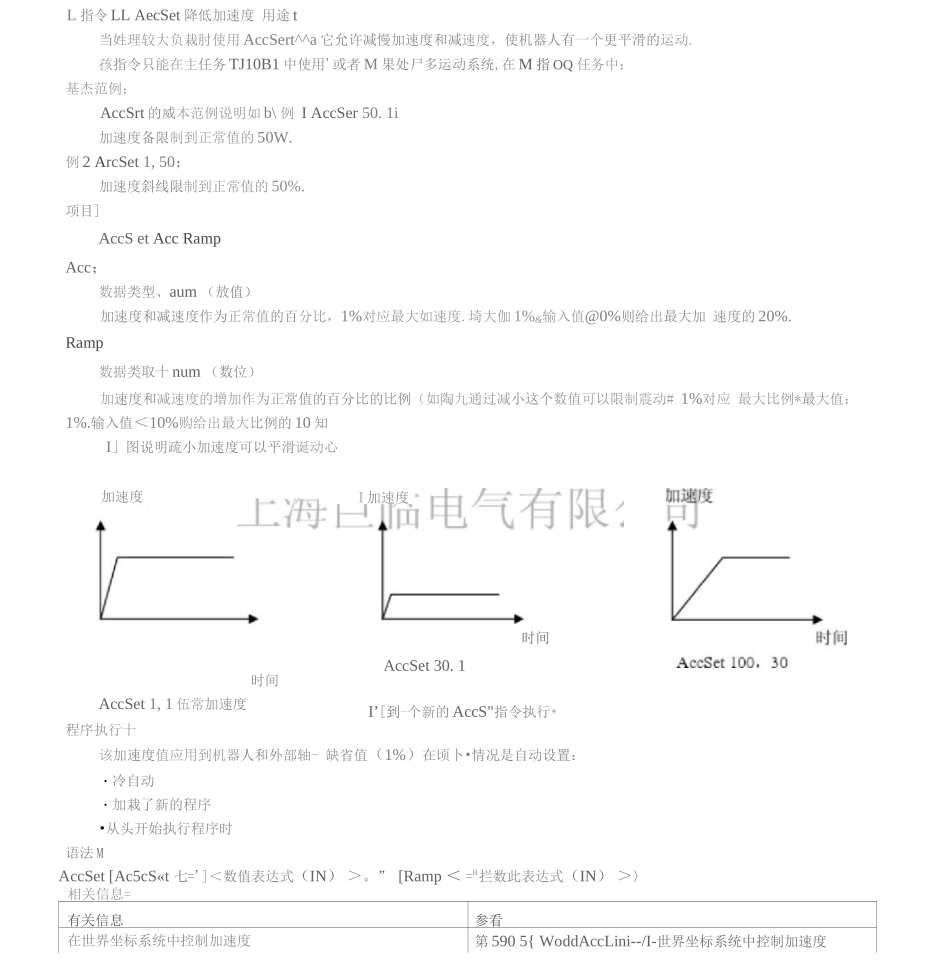
Ramp数据类取十 num (数位)加速度和减速度的增加作为正常值的百分比的比例(如陶九通过减小这个数值可以限制震动# 1%对应 最大比例*最大值:1%
输入值<10%购给出最大比例的 10 知I」图说明疏小加速度可以平滑诞动心时间AccSet 1, 1 伍常加速度程序执行十该加速度值应用到机器人和外部轴- 缺省值(1%)在顷卜•情况是自动设置:・冷自动・加栽了新的程序•从头开始执行程序时语法 MAccSet [Ac5cS«t 七=']<数值表达式(IN ) >
” [Ramp < =H拦数此表达式(IN ) >〉相关信息=有关信息参看在世界坐标系统中控制加速度第 590 5{ WoddAccLini--/I-世界坐标系统中控制加速度I’[到-个新的 AccS"指令执行•加速度I 加速度时间AccSet 30
1沿着路径降 kt TCP 加速度第 265 Si PathAcrcLim 沿路径降低 TCP 加速授「定位指令RAPID 参考「册-RAPID 厦述,RAPID 摘耍部分-诞动1
ActUnit—激活一个机械单元用途;