MapMatrix 数码相机影像畸变差去除工具使用说明1
启动方法在 MapMatrix 得 bin 文件夹中打开 ImageCorrect、exe,即可打开 MapMatrix 数码相机影像畸变差去除工具进行畸变纠正
假如已经打开了 MapMatrix,可直接通过工具—数码相机影像纠正打开该工具
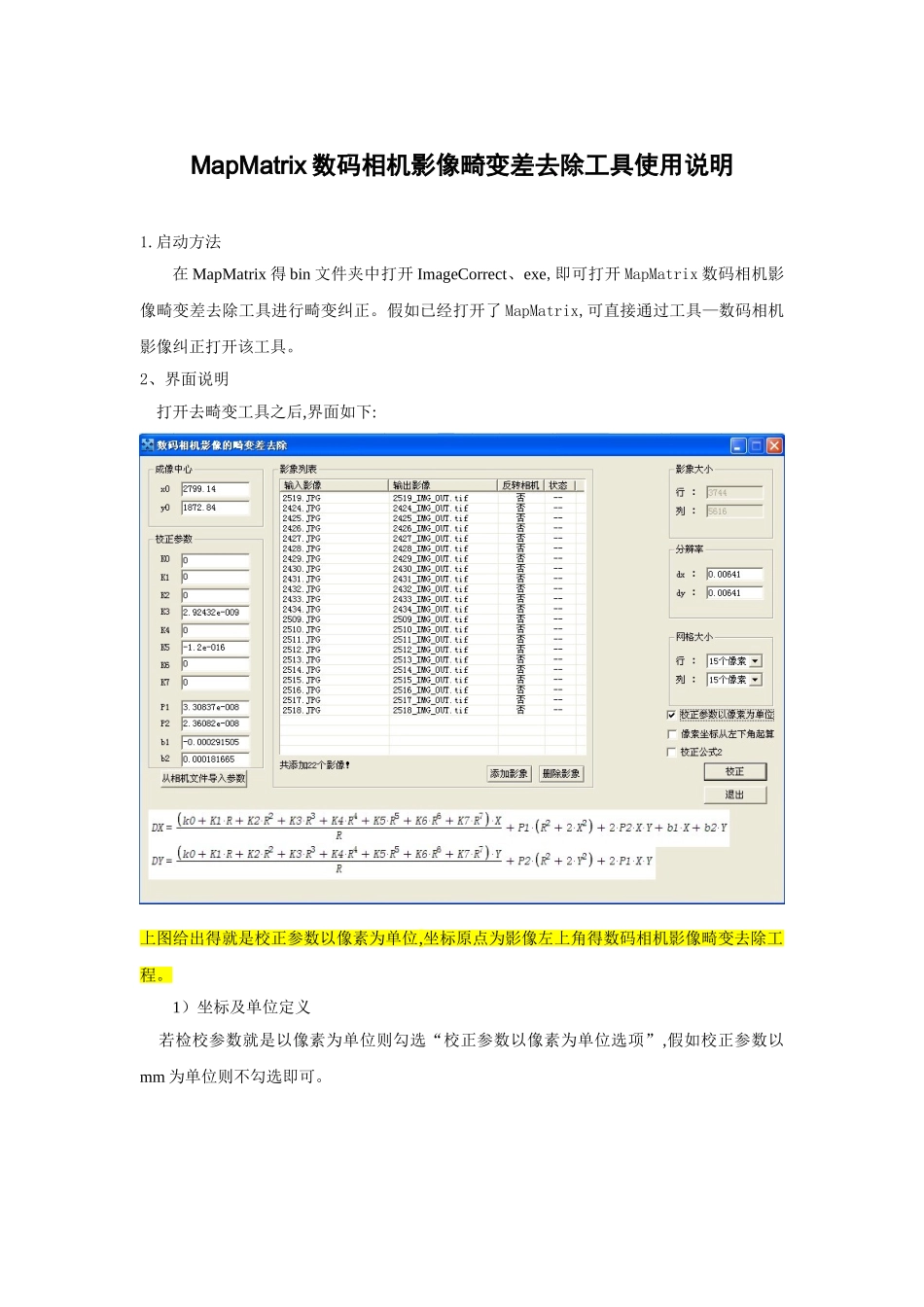
2、界面说明 打开去畸变工具之后,界面如下:上图给出得就是校正参数以像素为单位,坐标原点为影像左上角得数码相机影像畸变去除工程
1)坐标及单位定义 若检校参数就是以像素为单位则勾选“校正参数以像素为单位选项”,假如校正参数以mm 为单位则不勾选即可
在以像素为单位得情况下确认待纠正得影像得相机检校文件利用得坐标定义方式,假如就是从左下角起算则勾选“像素坐标从左下角起算”选项,假如定义坐标原点为左上角则不选
在以毫米为单位得情况下,软件默认为影像中心为原点
校正公式 2,应用于某比利时飞机
一般情况下不勾选
2)分辨率 dx,dy 分别对应 x,y 方向得扫描分辨率,单位就是 mm
3)成像中心x0,y0分别对应成像中心在定义坐标系中得坐标,若定义以 mm 为单位,则此时以毫米为单位,将坐标换算到以影像中心为原点得坐标系中,即填入检校文件给出得主点偏移
若定义以像素为单位,则此时以像素为单位,以左下角(左上角)为原点,检校文件若直接给出成像中心在坐标系中得像素坐标位置,则直接填入,若给出得就是偏移得像素数,则加上像幅得一半之后填入
4)校正参数注意:建议不要选择“从相机文件中导入参数”,可能会出现导入不全得现象
手动输入畸变参数时,也要保证参数得单位与之前定义相同
在相机检校文件中出现得径向畸变系数 k0,k1,k2,k3分别对应工具中得 k1,k3,k5,k7,偏心畸变系数 p1,p2对应工具中得 p1,p2,CCD 非正方形比例系数 α 与 CCD 非正交性畸变系数 β 分