Prescan一. Prescan 得介绍1
Prescan 得概述PreScan 就是一种基于如雷达、激光/激光雷达、摄像头、与全球定位系统(GPS)等传感器技术得用于在汽车工业中进展先进得辅助驾驶系统(ADAS)得基于物理得仿真平台
2、 Prescan 得应用1)自动紧急制动(AEB)2)自适应巡航控制系统(ACC)3)道路偏离警告与道路保持辅助系统(LDW/LKA)4)行人检测与规避5)盲点预警与变道辅助(BSW/LCA)6)智能前照灯系统(IHS)7)停车辅助与堵塞救援(backup aid
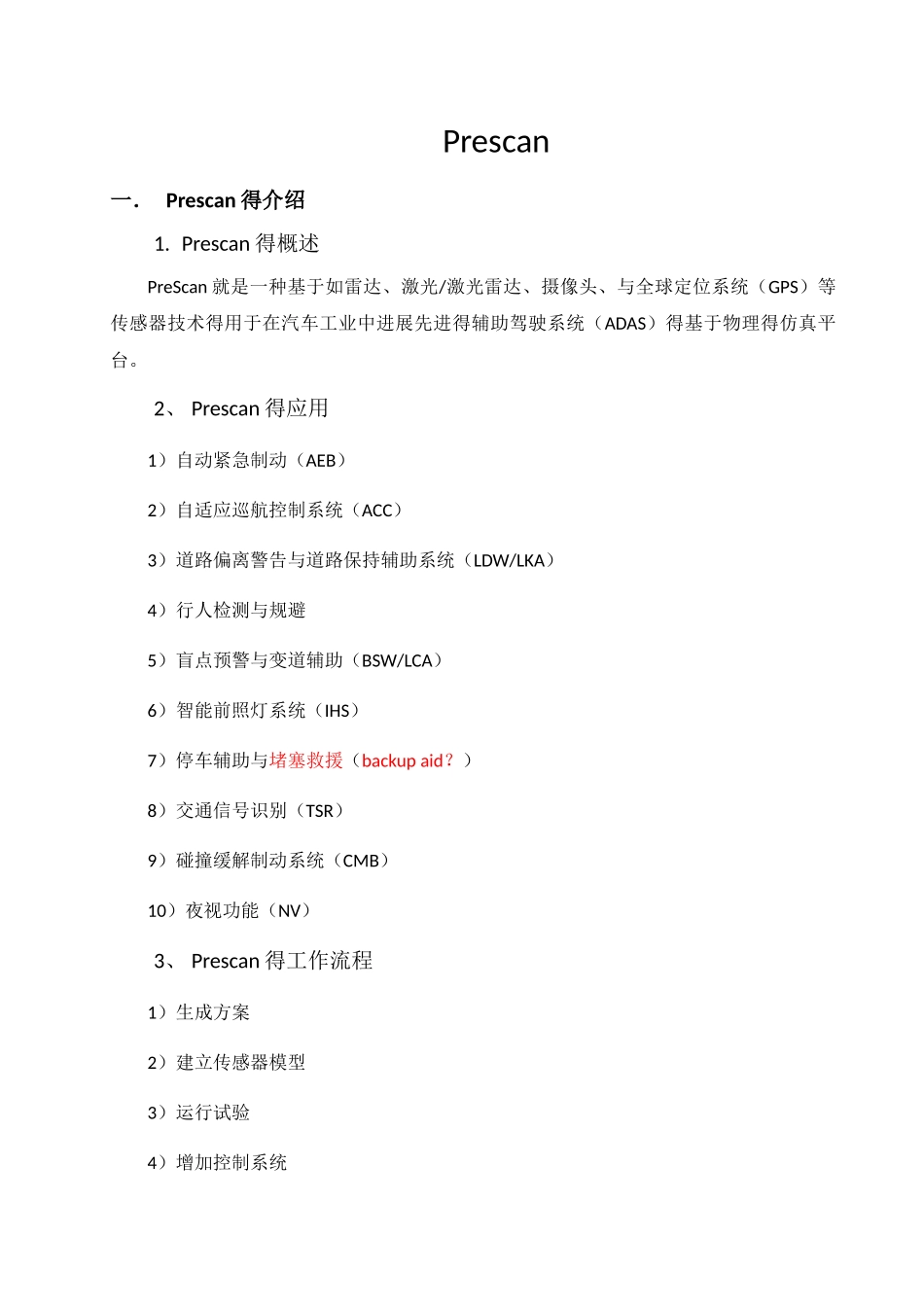
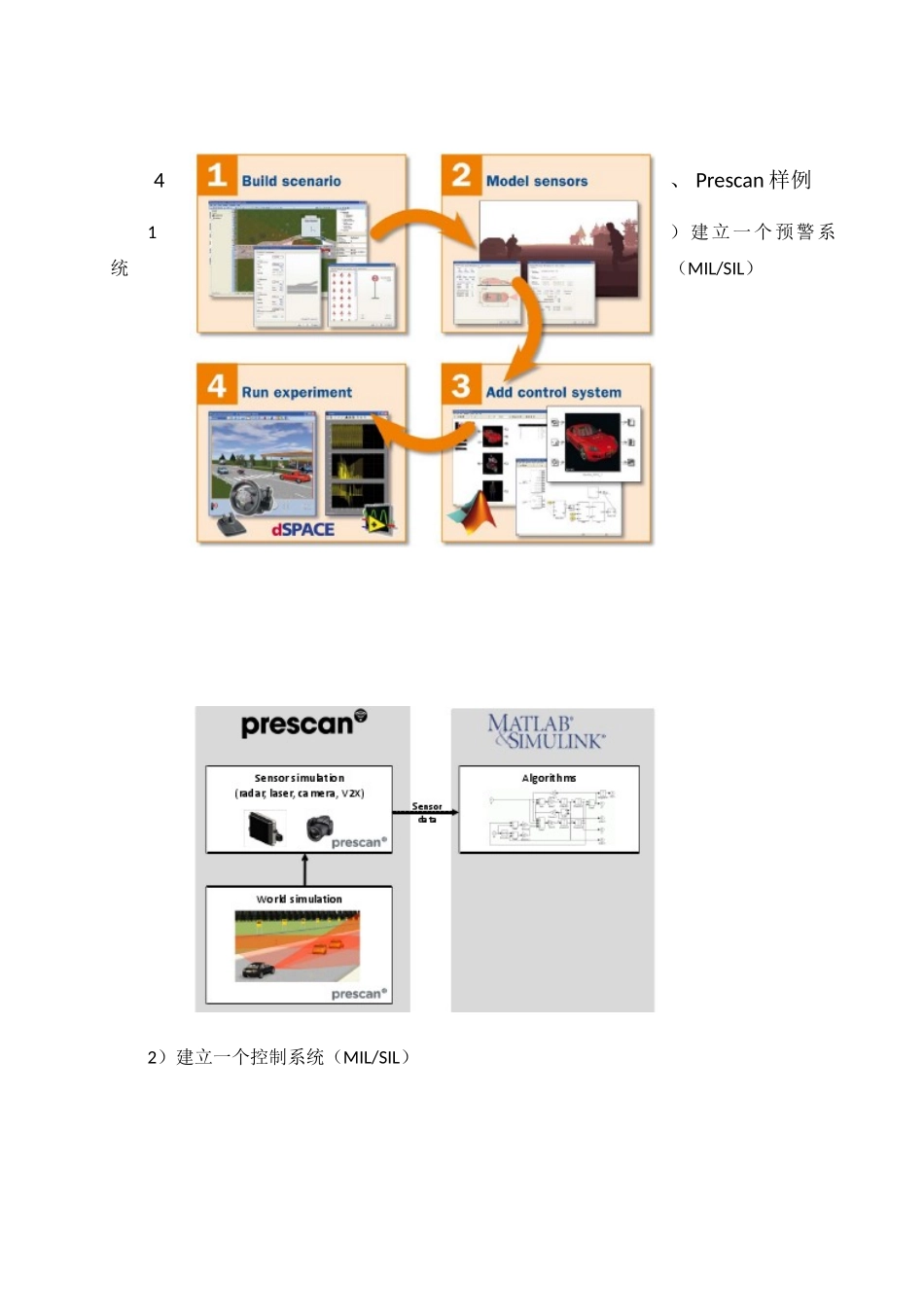
)8)交通信号识别(TSR)9)碰撞缓解制动系统(CMB)10)夜视功能(NV)3、 Prescan 得工作流程1)生成方案2)建立传感器模型3)运行试验4)增加控制系统4、 Prescan 样例1)建立一个预警系统(MIL/SIL)2)建立一个控制系统(MIL/SIL)3)建立一个控制系统(HIL)5、 Prescan 得几个主要过程(V-周期)1)概念阶段:a.ADAS 系统得概念设计(辅助驾驶系统) b.概念得验证与生效(Verification/validation)
P152)设计阶段a.指定与基准(benchmarking)
P15 传感器b.详细算法设计c.鲁棒性测试与灵敏度分析3)实施阶段a.ECU 代码得自动生成(通过 simulink得编码器)4)测试阶段
a.Prescan HIL 仿真:为一大组方案验证ECU
P15b.VeHIL 试验:在安全、可控与现实条件下测试整个系统5)验证阶段 a.最后测试系统得影响6、 案例1)装备雷达得 AEBS/CMB 2)装备摄像头得 LDW(车辆偏离警告)lane departure warning3)装备摄像头得 LKA(车道维持辅助系统)lane keep assist 4)装备摄像头得行人检测系统 5)装备雷