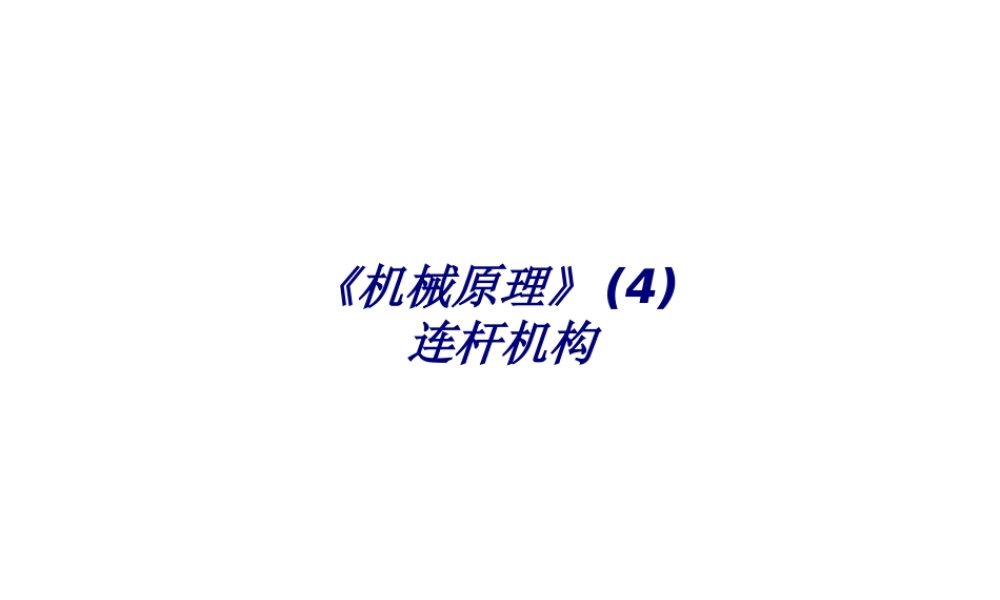
《机械原理》 (4)连杆机构 实际应用举例:雷达天线俯仰机构飞机起落架 连杆机构的基本型式及演化1
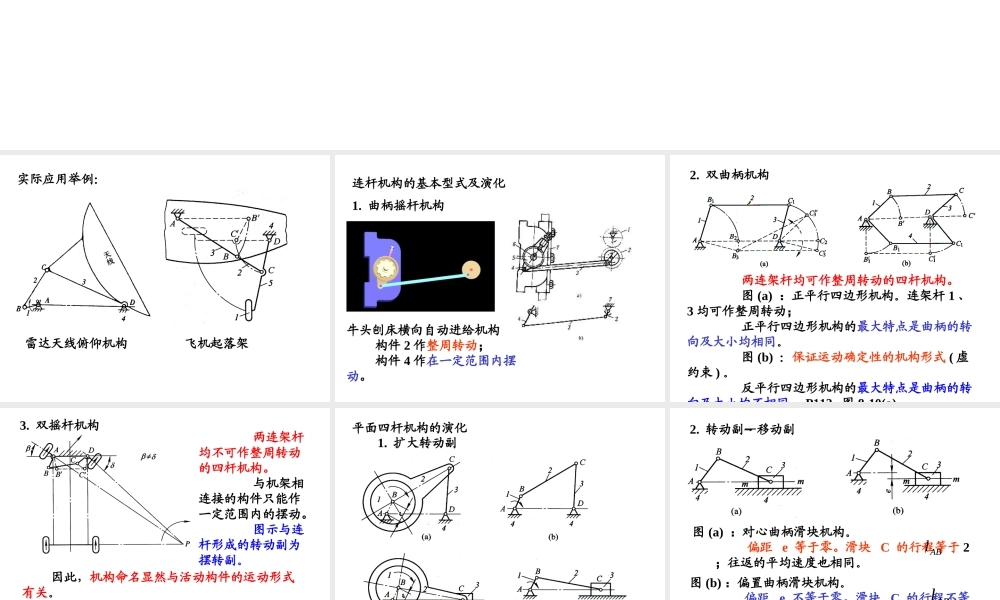
曲柄摇杆机构牛头刨床横向自动进给机构 构件 2 作整周转动; 构件 4 作在一定范围内摆动
双曲柄机构 两连架杆均可作整周转动的四杆机构
图 (a) :正平行四边形机构
连架杆 1 、3 均可作整周转动; 正平行四边形机构的最大特点是曲柄的转向及大小均相同
图 (b) :保证运动确定性的机构形式 ( 虚约束 )
反平行四边形机构的最大特点是曲柄的转向及大小均不相同
P113 图 8-10(a) 3
双摇杆机构 两连架杆均不可作整周转动的四杆机构
与机架相连接的构件只能作一定范围内的摆动
图示与连杆形成的转动副为摆转副
因此,机构命名显然与活动构件的运动形式有关
形成的运动方式与可运动构件的转动范围、运动形式有关 ( 如:正、反平行四边形机构 )
平面四杆机构的演化 1
扩大转动副 2
转动副—移动副图 (a) :对心曲柄滑块机构
偏距 e 等于零
滑块 C 的行程等于 2 ;往返的平均速度也相同
ABl图 (b) :偏置曲柄滑块机构
偏距 e 不等于零
滑块 C 的行程不等2 ;往返的平均速度也不相同
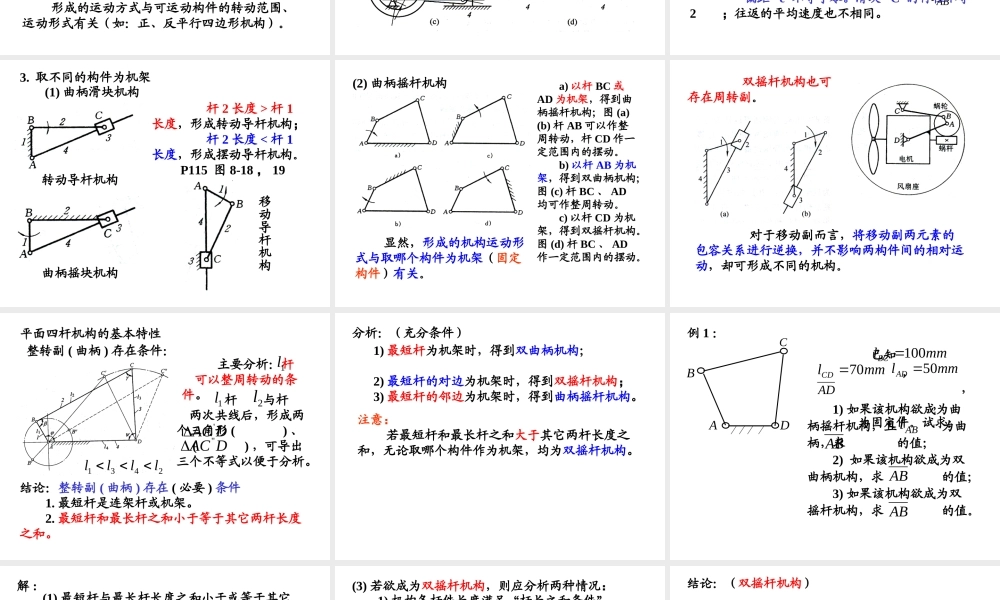
取不同的构件为机架 (1) 曲柄滑块机构 杆 2 长度 > 杆 1长度,形成转动导杆机构; 杆 2 长度 < 杆 1长度,形成摆动导杆机构
P115 图 8-18 , 19转动导杆机构曲柄摇块机构移动导杆机构 (2) 曲柄摇杆机构 a) 以杆 BC 或AD 为机架,得到曲柄摇杆机构;图 (a) (b) 杆 AB 可以作整周转动,杆 CD 作一定范围内的摆动
b) 以杆 AB 为机架,得到双曲柄机构;图 (c) 杆 BC 、 AD均可作整周转动
c) 以杆 CD 为机架,得到双摇杆机构
图 (d) 杆 BC 、 AD作