机械原理大作业院系:船舶与海洋工程学院专业:机械设计制造及自动化班级:1413104学号:141310423姓名:田笑哈尔滨工业大学(威海)作业 1 连杆机构运动分析1
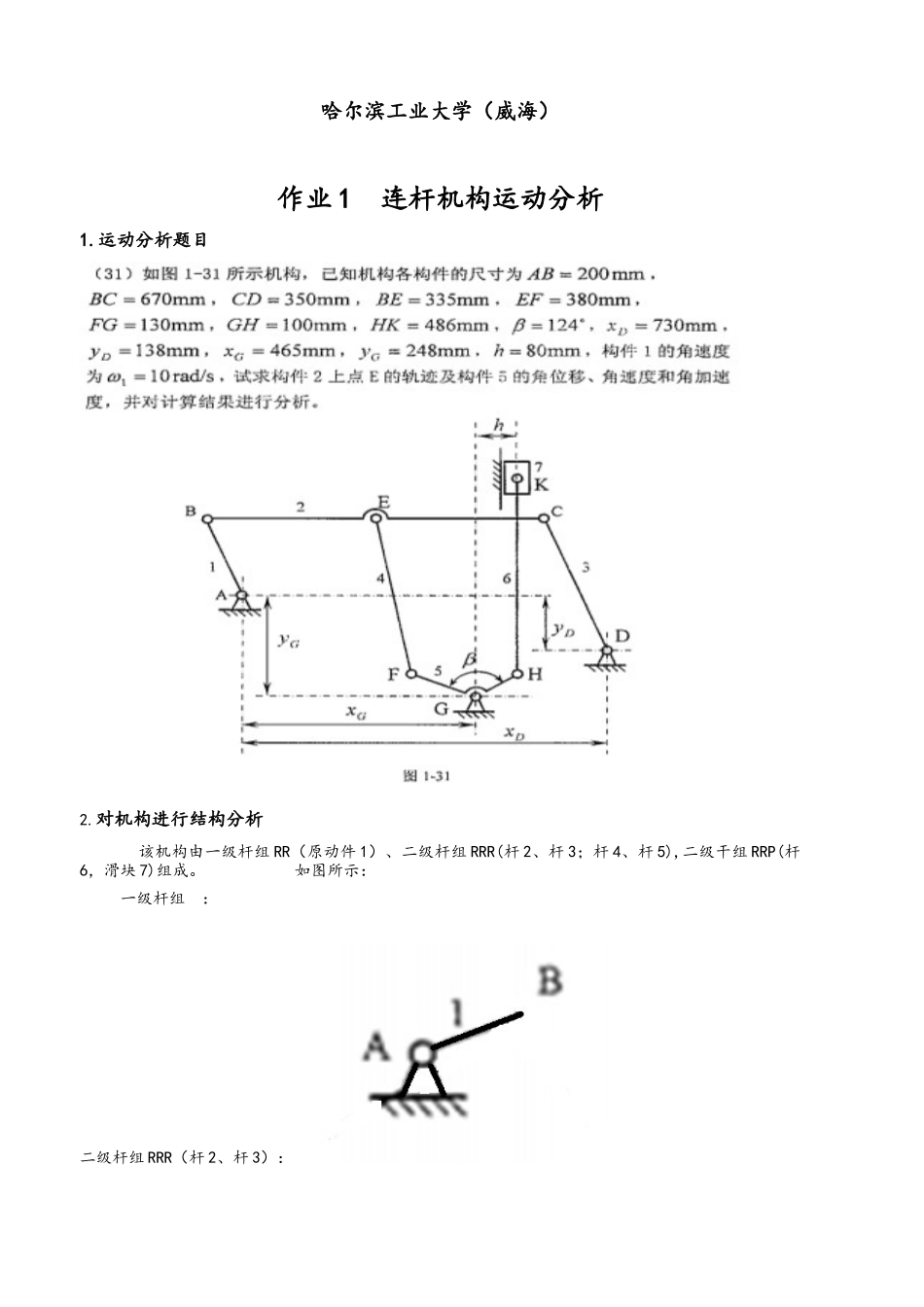
运动分析题目2
对机构进行结构分析 该机构由一级杆组 RR(原动件 1)、二级杆组 RRR(杆 2、杆 3;杆 4、杆 5),二级干组 RRP(杆6,滑块 7)组成
如图所示: 一级杆组 : 二级杆组 RRR(杆 2、杆 3): 二级杆组 RRR(杆 4、杆 5): 二级杆组 RRP(杆 6、滑块 7): 3
建立坐标系 建立以 A 点为坐标原点的坐标系 4
建立组成各基本杆组的运动分析数学模型 (1)一级杆组运动分析: 如一级杆组图所示,设 AB 杆与 X 轴夹角为 p,AB 逆时针转动
位置分析:x_B=x_A+l
*cos(p); y_B=y_A+l
*sin(p); 速度分析:v_Bx=l
*sin(p)
*w; v_By=l
*cos(p)*w; 加速度分析:a_Bx=w^2*l
*cos(p)
*-1-e*l
*cos(p); a_By=w^2*l
*sin(p)
*-1+e*l
*sin(p); (2)二级杆组(RRR型)运动分析: 如二级杆组图(杆2、杆3)所示,设CB与X轴夹角为p_2
角位移分析:d=sqrt((x_D-x_B)
^2+(y_D-y_B)
^2); b=atan((y_D-y_B)
/(x_D-x_B)); r=acos((d
^2+l_2^2-l_3^2)
/(2*l_2
*d)); x_C=x_B-l_2*cos(p_2); y_C=y_B-l_2*sin(p_2); p_2=b+M
*r; p_3=atan((y_C-y_D)
/(x_C-x_D)); 角速度分析: 角加速度分析: E=a_Dx-a_Bx+w_2^2*(x_C-x_B)-w_3^2*(