爬墙机器人结构设计1 爬墙机器人分类1、1 用于检测与维修领域爬墙机器人需满足得要求1)速度与机动性:对爬墙机器人来说速度与机动性就是它最重要得两个参数
由于垂直结构得尺寸要求,即使在竖直方向或者天花板上,在检测区域与一些相似点之间也需要实现快速移动
其她得要求与系统得操控与定位能力有关,这包括移动轨迹得精确性,因为一些用于检测得传感器要求在表面进行光滑且连续得运动
也有可能要求机器人横向运动或者旋转 360°来满足位置传感器与一些工具得要求
最后一点,机器人必须解决台阶与突起等越障问题,以此来保证其可以到达建筑物得任何一个角落
2)负载能力:机器人必须具有携带不同重量得负载得能力
对于一个表面得检测,携带至少 10kg 得检测装置负载就是必须得,因此,机器人得尺寸、吸附与运动装置都应该满足应用得要求
3)可靠性与安全性:鲁棒性就是机器人一个非常重要得非功能性得性质
假如爬墙机器人在它得一次任务中失败了,它就不能在实践中投入使用
可靠性与安全性要求包括:硬件鲁棒性、最优控制、检测方法、处理危险情况以及自我恢复等
系统本身要保证吸附得足够安全,因为就算就是可控得跌落也就是很危险得
4)易用性:作为一个检测装置,爬墙机器人需要比一般得装置更强大、更有效率、更安全
这当然也包括机动性与处理问题得多样性
因此,根据任务要求,它必须能携带各种不同得负载,容易损耗得零件能够快速被替换,与现有得技术相比它得操作必须快且简单,此外,能耗、重量及机器人得尺寸也就是很重要得
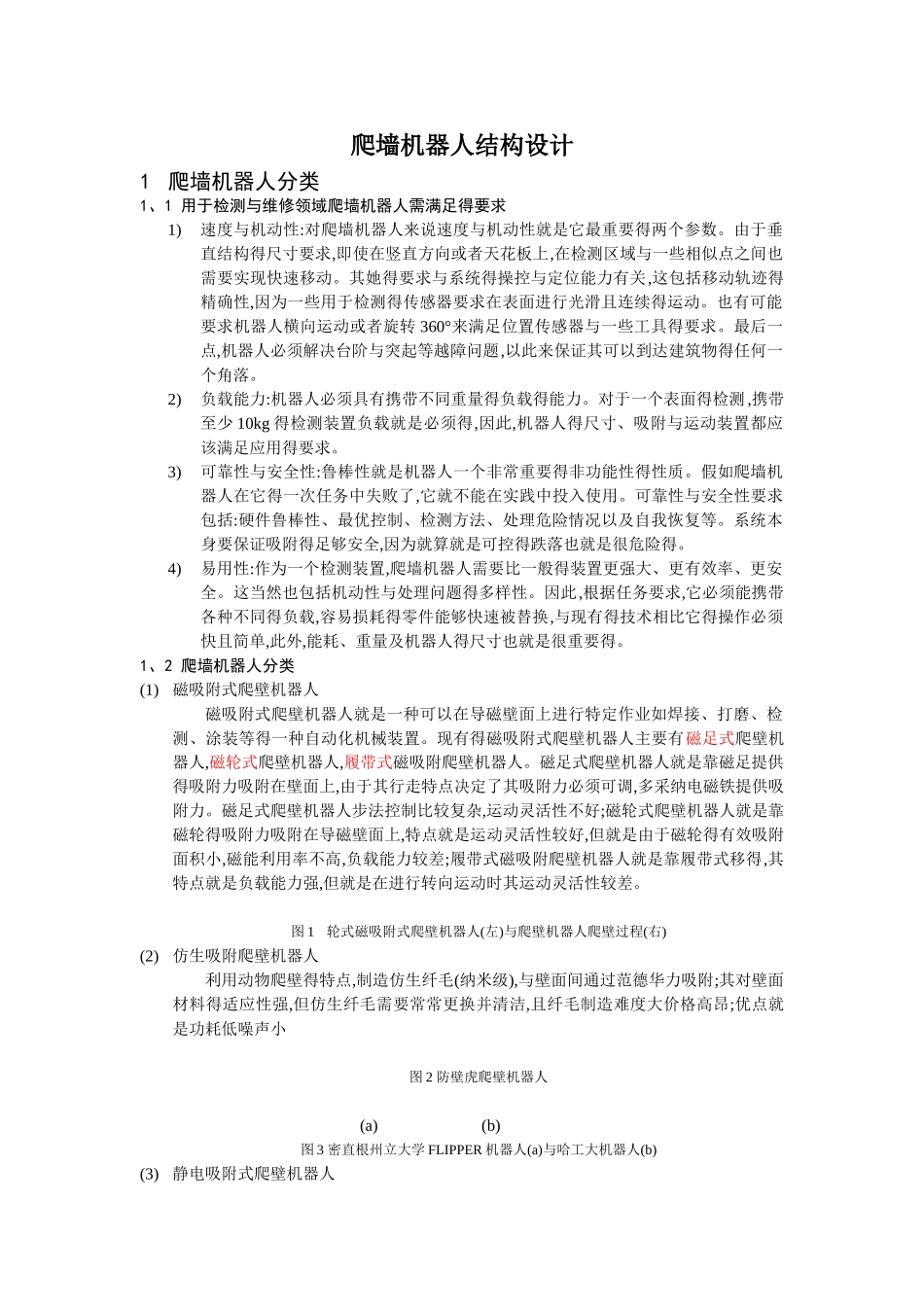
1、2 爬墙机器人分类(1)磁吸附式爬壁机器人磁吸附式爬壁机器人就是一种可以在导磁壁面上进行特定作业如焊接、打磨、检测、涂装等得一种自动化机械装置
现有得磁吸附式爬壁机器人主要有磁足式爬壁机器人,磁轮式爬壁机器人,履带式磁吸附爬壁机器人
磁足式爬壁机器人就是靠磁足提供得吸附力吸附在壁面上,由于其行走特点决定了其吸附力必须可