ABBRobotstudio 仿真软件项目式使用说明1
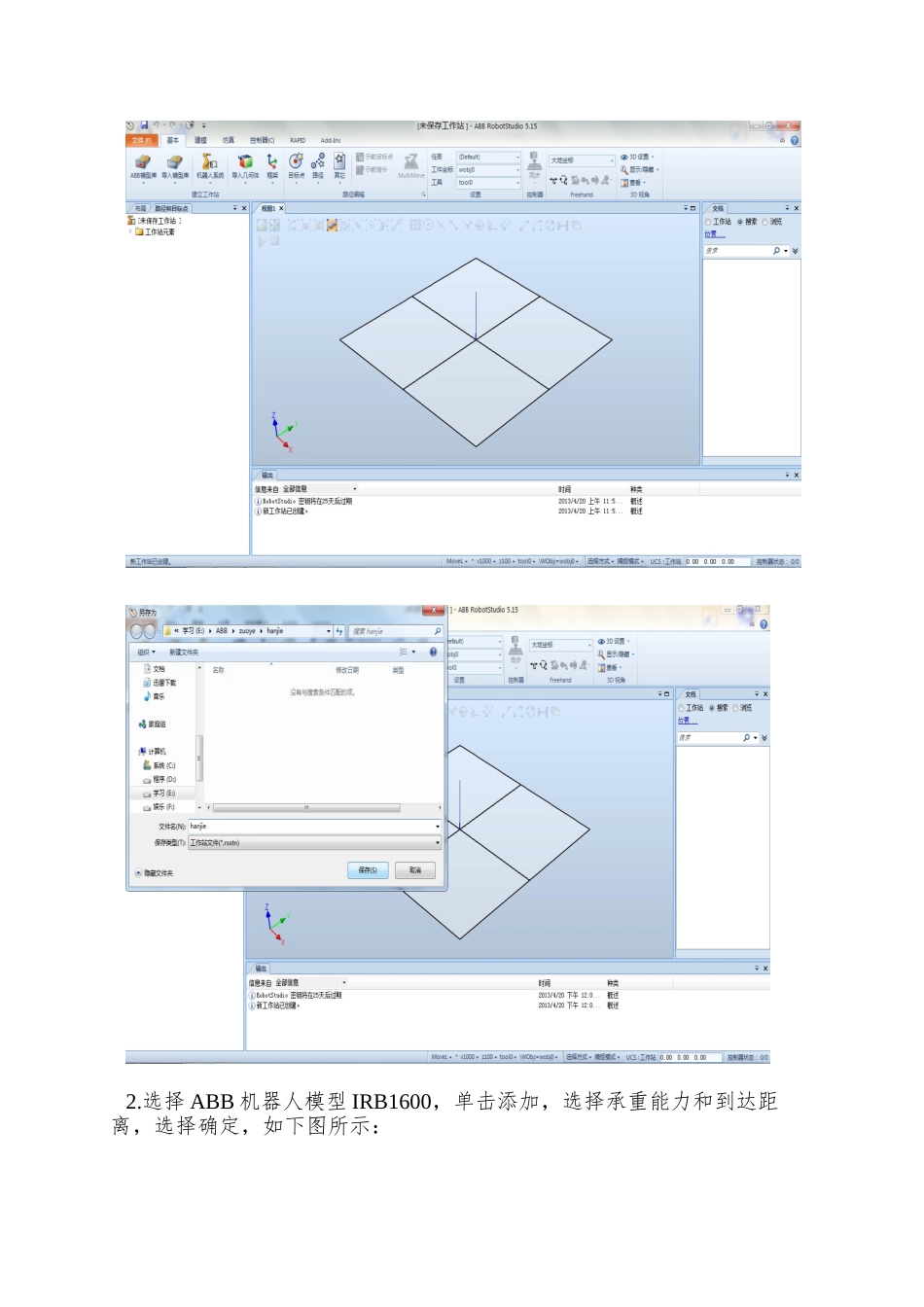
打开 Robot studio 软件,单击创建新建空工作站,同时储存一下,如下图所示;2
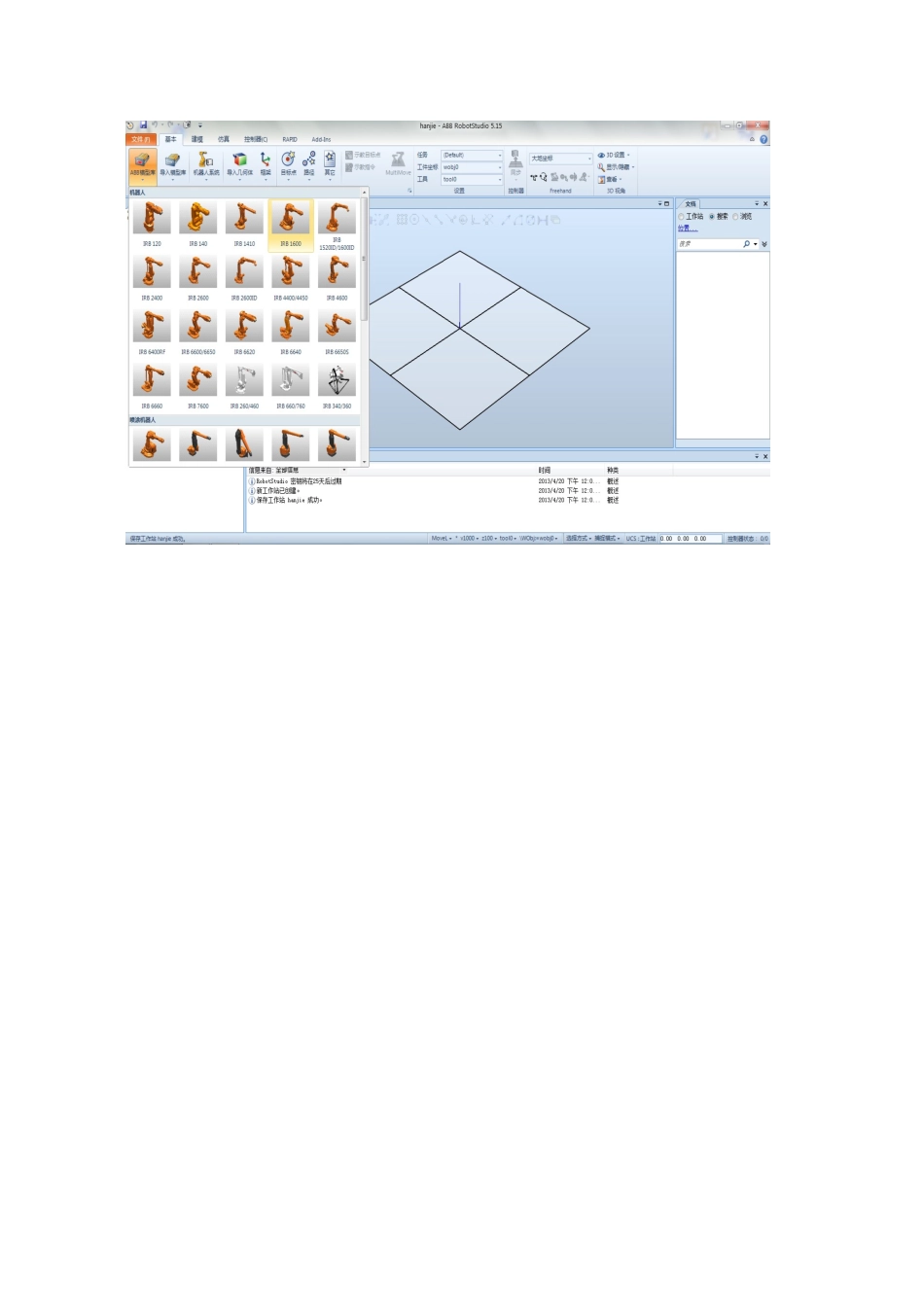
选择 ABB 机器人模型 IRB1600,单击添加,选择承重能力和到达距离,选择确定,如下图所示:3
导入设备-tools-Binzel air 22,并拖动安装在机器人法兰盘上:4
选择建模-固体-矩形体,设定长宽高,点击创建:选择差不多-机器人系统-从布局创建系统-下一步-下一步-完成;操纵器启动完成后,选择路径-创建一个空路径,创建成功后,修改下方参数:moveJ , V1000,Z1008
激活当前路径,选择机器人起点,单击示教指令9
开启捕捉末端或角点,同时将机器人的移动模式设为手动线性,将机器人工具移到矩形体的一个角点上,单击示教指令,形成第一条路径,依次示教四个角点,形成路径,右击路径,选择查看机器人目标,可将机器人移动到当前位置10
路径制作完成后,选择差不多-同步到 VC,在弹出的对话框中全部勾选,并点击确定,同步完成后选择仿真-仿真设定-将路径添加到主队列,选择应用--确定;11
选择仿真录像,点击播放,开始仿真录像
项目二:搬运机器人1
新建空工作站--导入机器人 IRB4600--选择最大承重能力,选择建模-固体-圆柱体,添加两个圆柱体,半径为 200mm,高度分不为 60mm 和500mm,把其中一个作为工具添加到法兰盘上,同时导入两个设备 Euro pallet 如下图所示:2
右击物体 或在左侧布局窗口中右击物体名称,在下拉菜单中选择设定颜色来更换颜色:3
根据布局创建机器人系统,细节与项目一相同,系统完全启动后,选择操纵器-配置编辑器,在下拉菜单中选择 I/O,在弹出窗口中新建 Unit,细节如下图所示;4
Unit 新建完毕后,右击新建 signal,新建 do1 和 do2,细节如下图所示:新建