PLC 控制机械手设计机械手电气操纵系统,除了有多工步特点之外,还要求有连续操纵和手动操纵等操作方式
工作方式的选择能够专门方便地在操作面板上表示出来
当旋钮打向回原点时,系统自动地回到左上角位置待命
当旋钮打向自动时,系统自动完成各工步操作,且循环动作
当旋钮打向手动时,每一工步都要按下该工步按钮才能实现
以下是设计该机械手操纵程序的步骤和方法
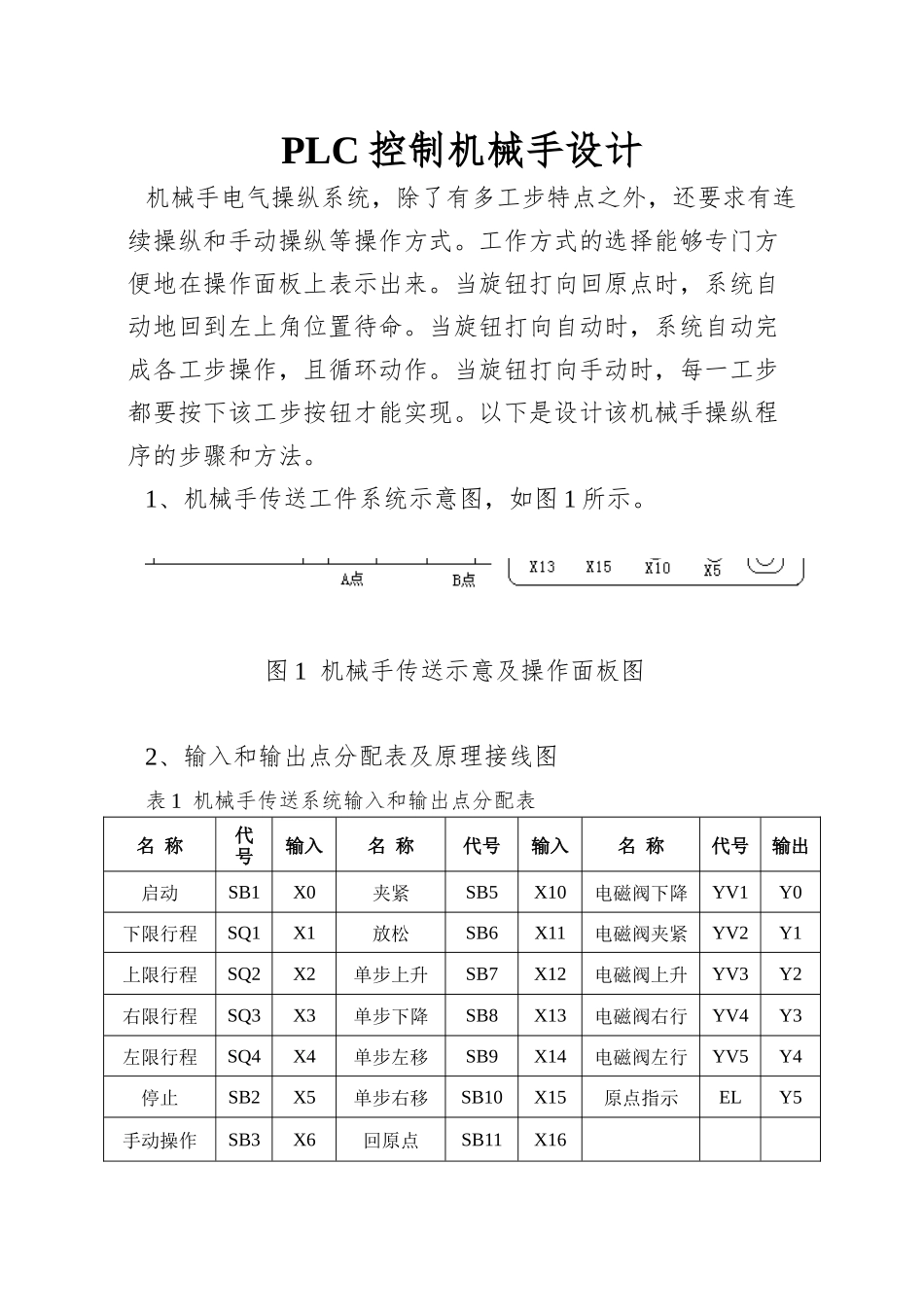
1、机械手传送工件系统示意图,如图 1 所示
图 1 机械手传送示意及操作面板图2、输入和输出点分配表及原理接线图表 1 机械手传送系统输入和输出点分配表名 称代号输入名 称代号输入名 称代号输出启动SB1X0夹紧SB5X10电磁阀下降YV1Y0下限行程SQ1X1放松SB6X11电磁阀夹紧YV2Y1上限行程SQ2X2单步上升SB7X12电磁阀上升YV3Y2右限行程SQ3X3单步下降SB8X13电磁阀右行YV4Y3左限行程SQ4X4单步左移SB9X14电磁阀左行YV5Y4停止SB2X5单步右移SB10X15原点指示ELY5手动操作SB3X6回原点SB11X16连续操作SB4X7工件检测SQ5X173、操作系统 操作系统包括回原点程序,手动单步操作程序和自动连续操作程序,如图 3 所示
其原理是:把旋钮置于回原点,X16 接通,系统自动回原点,Y5 驱动指示灯亮
再把旋钮置于手动,则 X6 接通,其常闭触头打开,程序不跳转(CJ 为一跳转指令,假如 CJ 驱动,则跳到指针 P 所指 P0 处),执行手动程序
之后,由于 X7 常闭触点,当执行 CJ 指令时,跳转到 P1 所指的终止位置
假如旋钮置于自动位置,(既 X6 常闭闭合、X7 常闭打开)则程序执行时跃过手动程序,直截了当执行自动程序
4、回原位程序回原位程序如图 4 所示
用 S10~S12 作回零操作元件
应注意,当用 S10~S19 作回零操作时,在最后状态中在自我复位