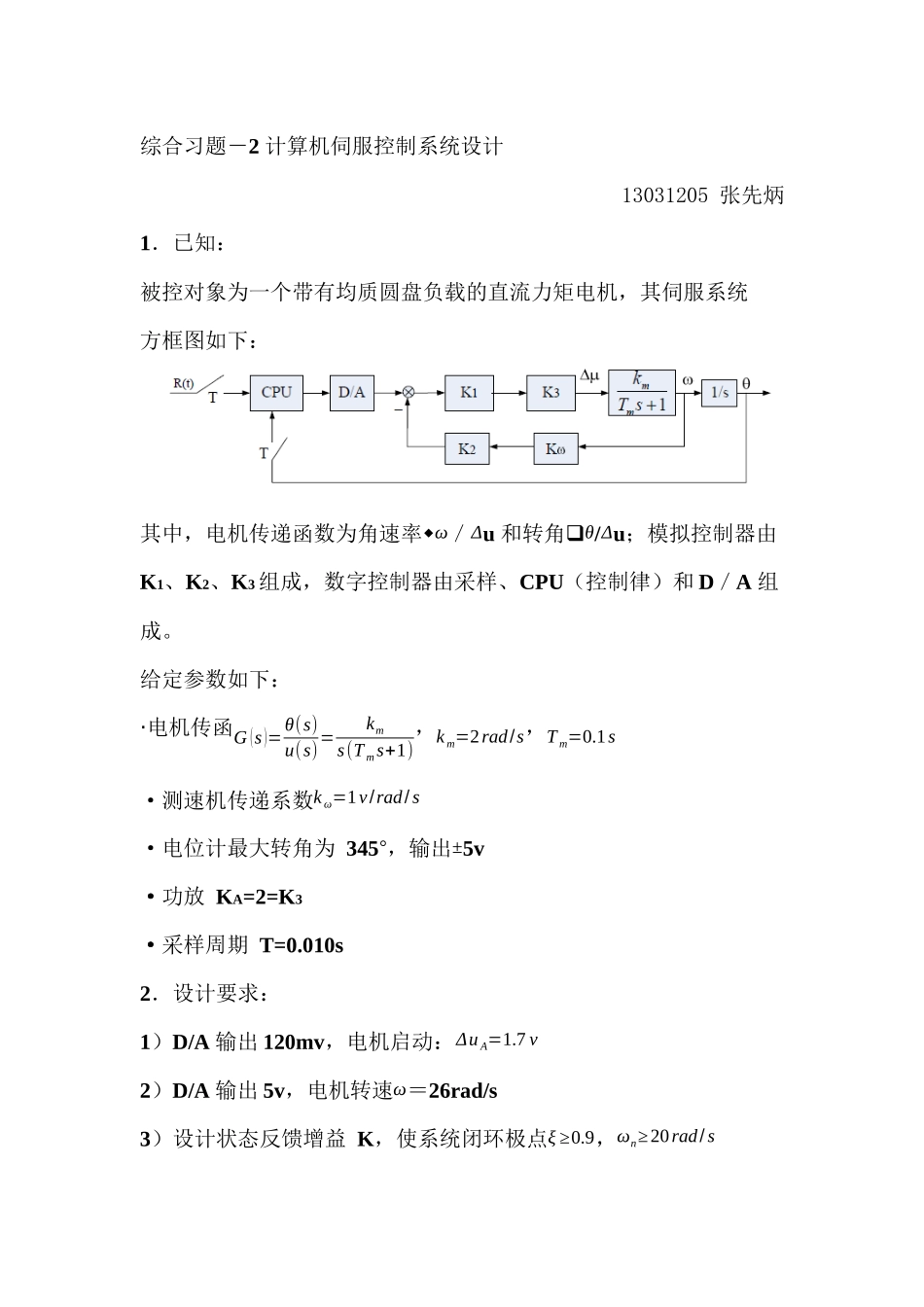
综合习题-2 计算机伺服控制系统设计13031205 张先炳1.已知:被控对象为一个带有均质圆盘负载的直流力矩电机,其伺服系统方框图如下:其中,电机传递函数为角速率ω/Δu 和转角θ/Δu;模拟控制器由K1、K2、K3 组成,数字控制器由采样、CPU(控制律)和 D/A 组成
给定参数如下:·电机传函G (s )=θ(s)u(s)=kms(T ms+1),k m=2rad/s,T m=0
1s·测速机传递系数k ω=1v/rad/ s·电位计最大转角为 345°,输出±5v·功放 KA=2=K3·采样周期 T=0
010s2.设计要求:1)D/A 输出 120mv,电机启动:Δu A=1
7 v2)D/A 输出 5v,电机转速ω=26rad/s3)设计状态反馈增益 K,使系统闭环极点ξ ≥0
9,ωn≥20rad/ s4)设θ可测,设计降维观测器(求 L),取观测器衰减速率是系统闭环衰减速率的 4 倍
5)求调节器的离散控制律 D(z)=U(z)/Y(z)
6)将 D(z)进行实现,配置适当的比例因子,编制相应的程序流程图
7)仿真验证调节器的控制效果
假设系统受到扰动,初试状态为:初速ω0=0,初始角度θ0=10
看看是否经过一定时间后,系统状态回到平衡的零态
8)(选作)引进指令信号,设计相应的指令跟踪控制器,仿真给出闭环系统的阶跃响应曲线
解:该系统传递函数(1)根据要求,启动电压,即 D/A 输出 120mV 电压经过后为 1
7V:,解得 (2)根据要求,时,由终值定理得:解得,所以: (3)定义状态变量x1=θ, x2=˙θ,则得到连续系统状态方程[˙x1˙x2]=[010−54
2][x1x2]+[0281
52]uy=θ=[10 ][x1x2]由 MATLAB 求对应的离散系统状态方程程序:>> A=[0,1;0,-54
2];>> B=[0;281