多轴飞行器(multi-rotors) 制作无人机详细资料: 多旋翼模型入门—理论知识篇 电池 Lithium Polymer battery串联:电压增加,电量不相加满电电压:4、2V(单节)安全电压:3、6V安全电量:20%电池容量:2200mAh(电池标注)/每片串联数:3S(可见)=12、6V充电倍率:5C(电池标注)最高充电电流: 5*2200*10-3=11A 这就是最高充电电流,一般采纳0、8-1、5C 充电电流=1、5A放电倍率:22C(电池标注)同充电电流储存电压:3、8V Smart battery meter插入时候注意正负极,可以测总电压、电量与分电压、电量
同时还可以给电机产生模拟信号:插入后长按 cell 键进入其她模式,F1 balance 平衡电池电量,短按cell 进入模式中;按 mode 切换到 F2 dis 放电模式,同理 F2 测内阻模式,F4 产生一定得信号
F4 产生得信号可以通过输出给电调,用以测试轴得旋转方向
在每一个模式中,短按 cell 可返回模式选择界面,长按返回最初界面
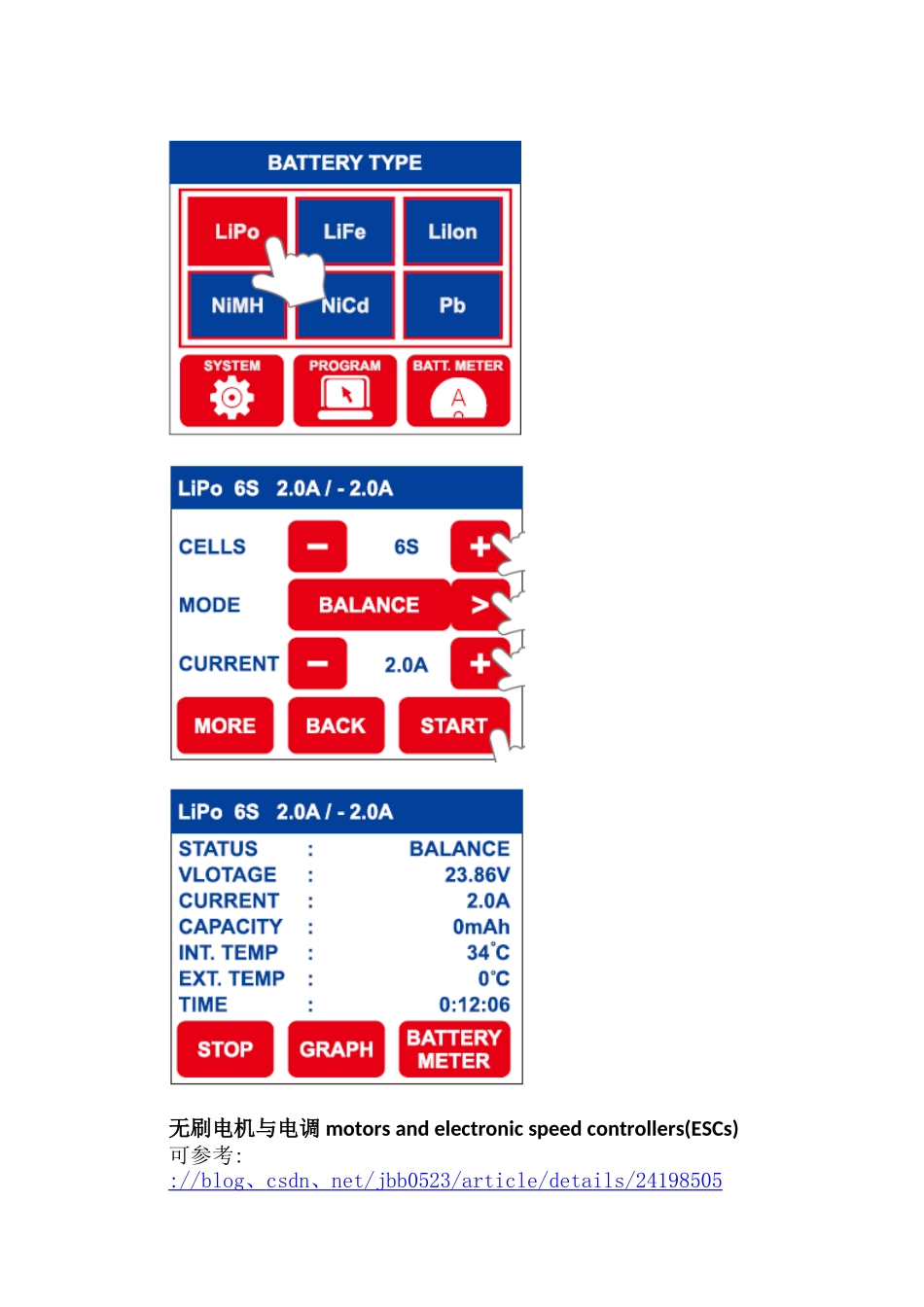
充电器主要需要得选项:电池类型 Li-Po,并行度 3S,充电类型平衡(充电时选)、放电、存储等,充电电流
无刷电机与电调 motors and electronic speed controllers(ESCs)可参考: ://blog 、 csdn 、 net/jbb0523/article/details/24198505 四旋翼飞行器结构与原理+四轴飞行 diy 全套入门教程 无刷电机电机为飞行器提供动力
由电调输出得三相沟通电驱动
三条线中互换两条会将电机得转向反向
电机不直接接电池
四六八轴飞行器转向: 安装螺旋桨时,注意螺旋桨转向必须保证推力向上,风向下推动
凸面为迎风面,对于四轴来说,就就是凸面朝上
电子调速器(ESC