基于 MATLAB 的曲柄摇杆机构优化设计1
问题的提出根据机械的用途和性能要求的不同,对连杆机构设计的要求是多种多样的,但这些设计要求可归纳为以下三种问题:(1)满足预定的运动规律要求;(2)满足预定的连杆位置要求;(3)满足预定的轨迹要求
设实际的函数为(称为再现函数),而再现函数一般是与期望函数不一致的,因此在设计时应使机构再现函数尽可能逼近所要求的期望函数
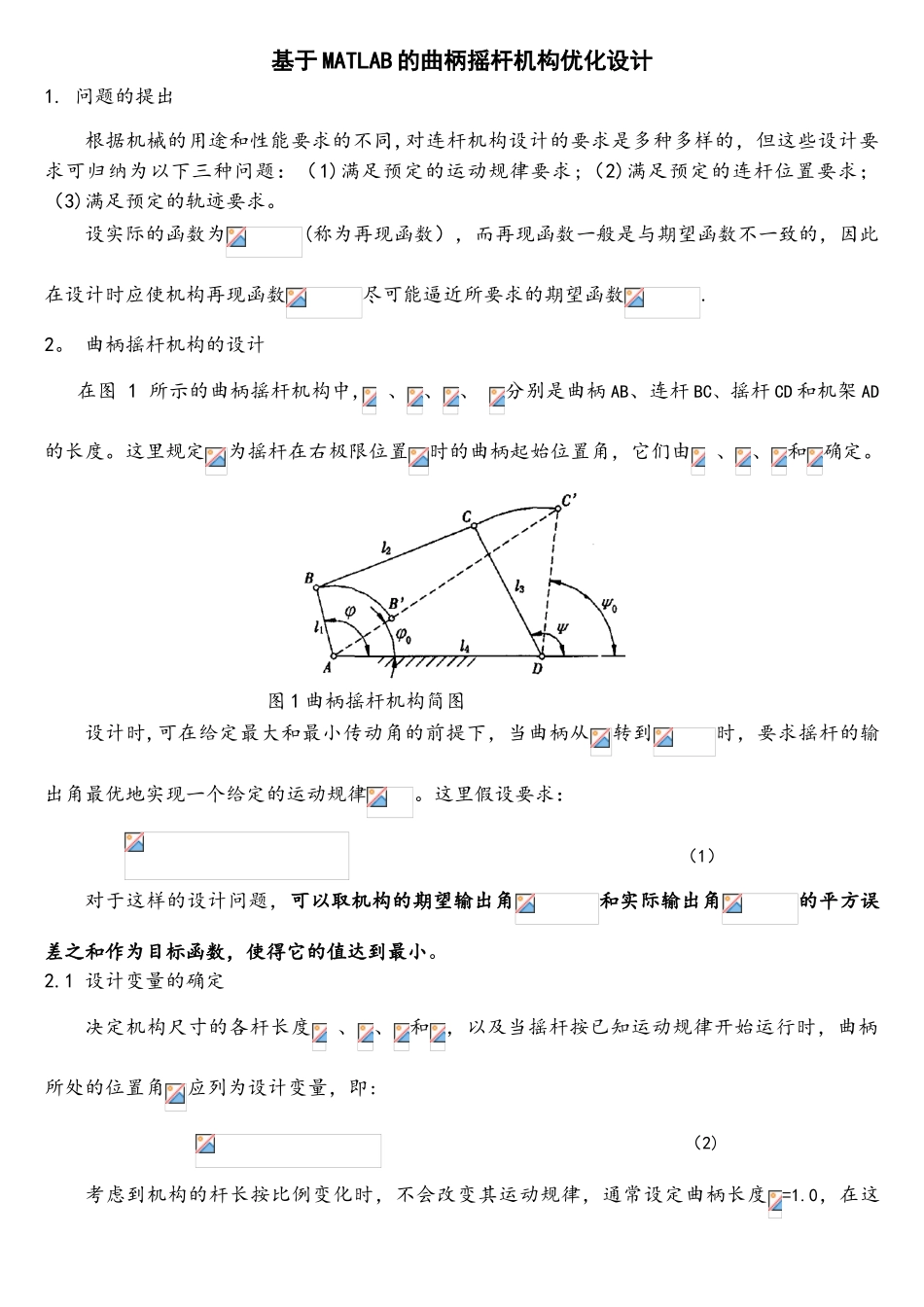
曲柄摇杆机构的设计在图 1 所示的曲柄摇杆机构中, 、 、 、 分别是曲柄 AB、连杆 BC、摇杆 CD 和机架 AD的长度
这里规定为摇杆在右极限位置时的曲柄起始位置角,它们由 、 、 和 确定
图 1 曲柄摇杆机构简图设计时,可在给定最大和最小传动角的前提下,当曲柄从转到时,要求摇杆的输出角最优地实现一个给定的运动规律
这里假设要求: (1)对于这样的设计问题,可以取机构的期望输出角和实际输出角的平方误差之和作为目标函数,使得它的值达到最小
1 设计变量的确定决定机构尺寸的各杆长度 、 、 和 ,以及当摇杆按已知运动规律开始运行时,曲柄所处的位置角应列为设计变量,即: (2)考虑到机构的杆长按比例变化时,不会改变其运动规律,通常设定曲柄长度=1
0,在这里可给定=5
0,其他杆长则按比例取为 的倍数
若取曲柄的初始位置角为极位角,则及相应的摇杆 位置角 均为杆长的函数,其关系式为: (3) (4)因此,只有 、 为独立变量,则设计变量为
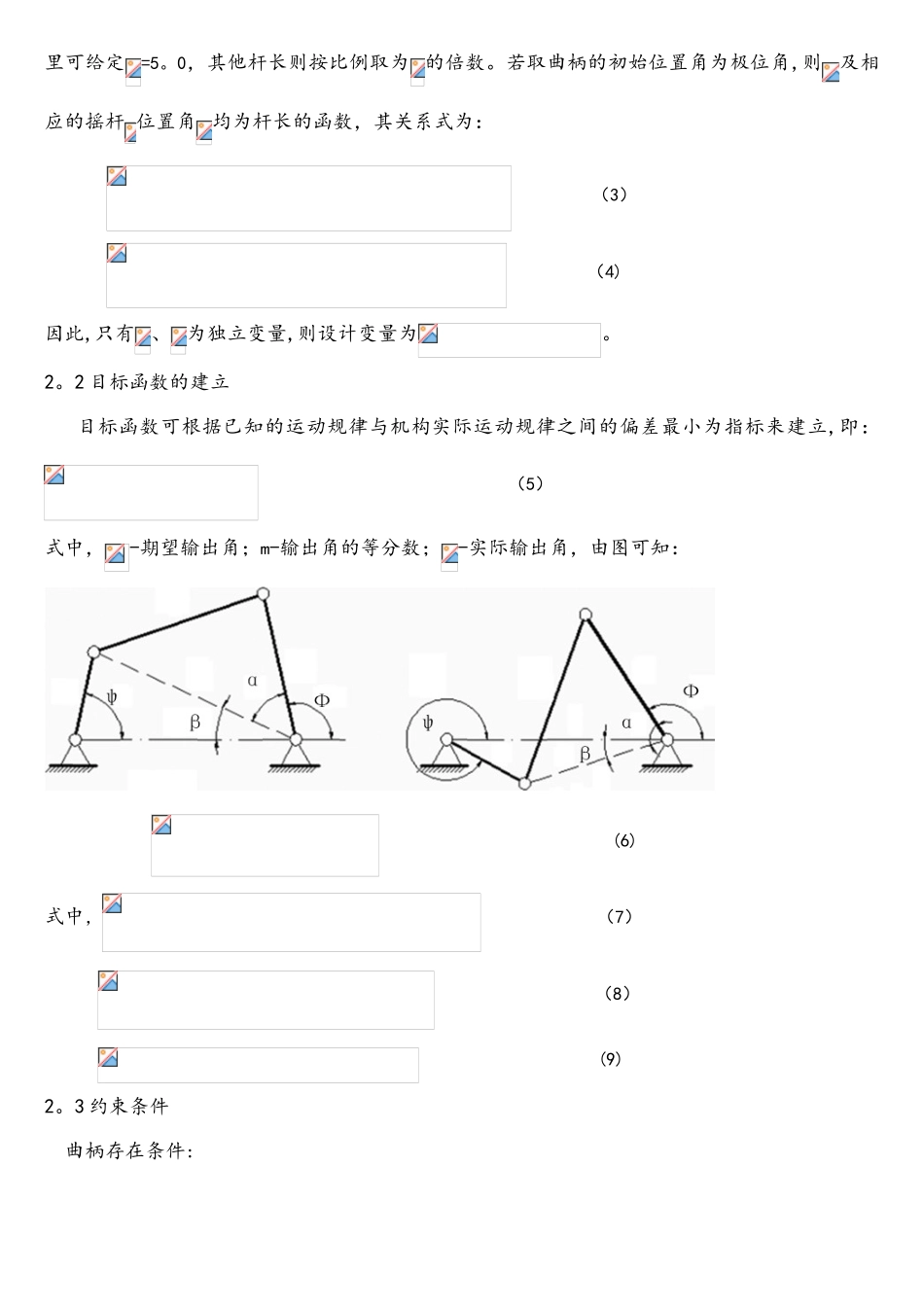
2 目标函数的建立目标函数可根据已知的运动规律与机构实际运动规律之间的偏差最小为指标来建立,即: (5)式中,-期望输出角;m-输出角的等分数;-实际输出角,由图可知: (6)式中, (7) (8) (9)2
3 约束条件曲柄存在条件: 曲柄与机架共线位置时的传动角(连杆 BC 和摇杆 CD 之间的夹角):最小传动角最大传动角由上面的分析可以算出: (10)