第二章 机构得结构分析一
组 成 机 构 得 基 本 要 素 就 是 与
机 构 具 有 确 定 运 动 得 条 件 就 是 :
在平面机构中,每一个高副引入 个约束,每一个低副引入 个约束,所以平面机构自由度得计算公式为 F =
应用该公式时,应注意得事项就是:
机构中各构件都应有确定得运动,但必须满足得条件就是:
根据图示机构,画出去掉了虚约束与局部自由度得等效机构运动简图 ,并计算机构得自由度
设标有箭头者为原动件,试推断该机构得运动就是否确定,为什么
计算图示机构得自由度
如有复合铰链、局部自由度、虚约束,请指明所在之处
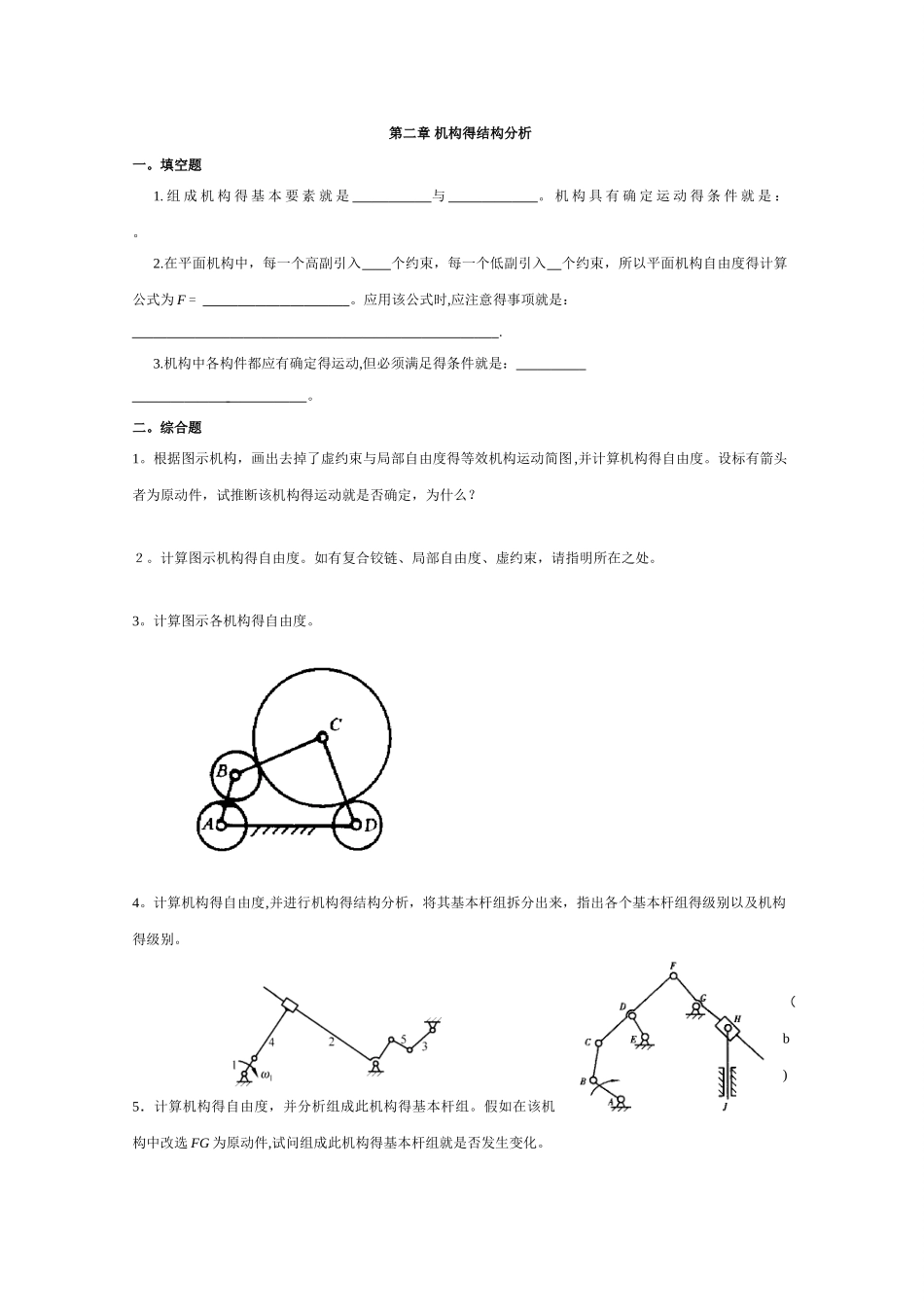
计算图示各机构得自由度
计算机构得自由度,并进行机构得结构分析,将其基本杆组拆分出来,指出各个基本杆组得级别以及机构得级别
(a)(b)5.计算机构得自由度,并分析组成此机构得基本杆组
假如在该机构中改选 FG 为原动件,试问组成此机构得基本杆组就是否发生变化
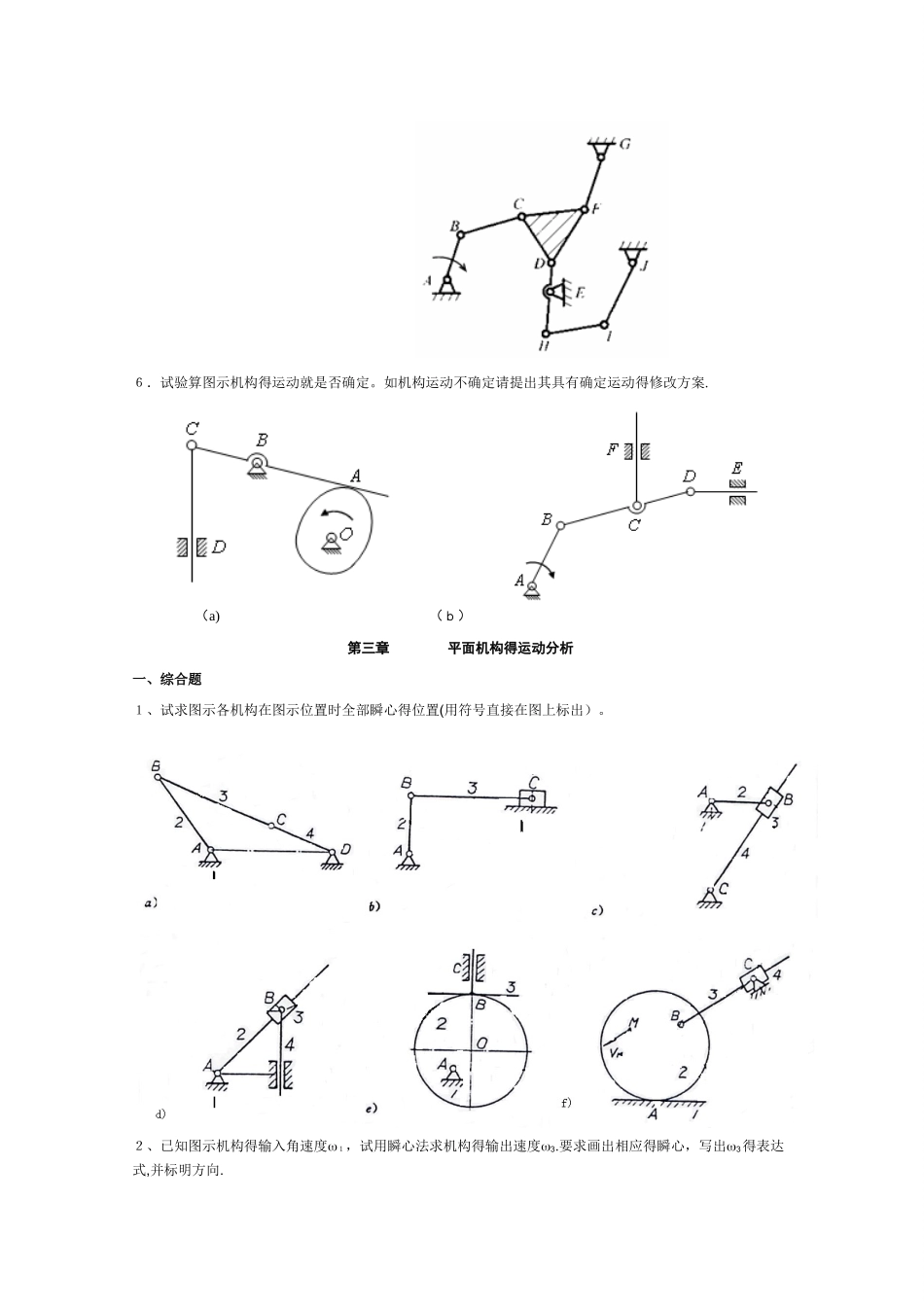
6.试验算图示机构得运动就是否确定
如机构运动不确定请提出其具有确定运动得修改方案
(a) (b)第三章平面机构得运动分析一、综合题1、试求图示各机构在图示位置时全部瞬心得位置(用符号直接在图上标出)
2、已知图示机构得输入角速度1,试用瞬心法求机构得输出速度3
要求画出相应得瞬心,写出3得表达式,并标明方向
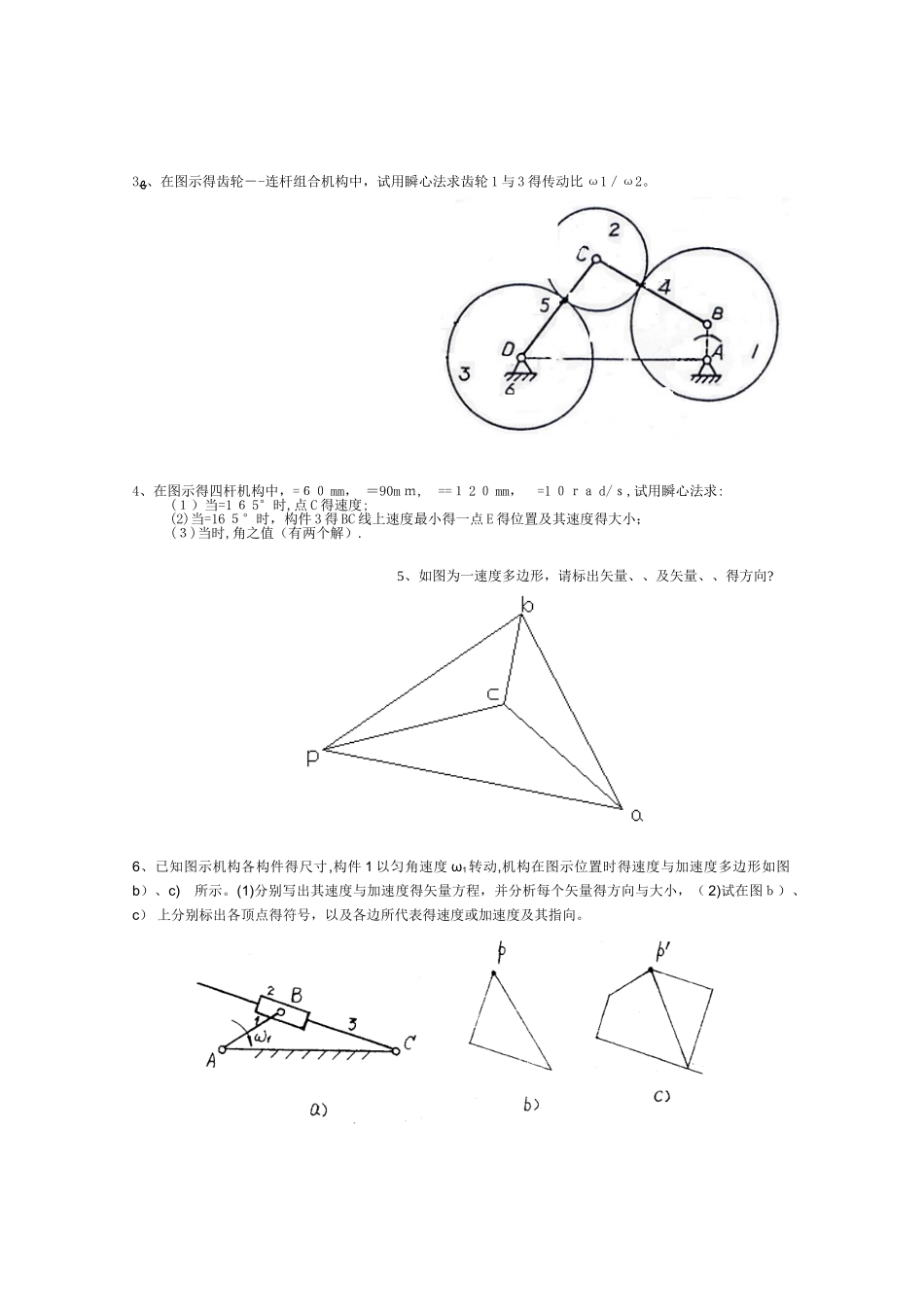
ﻬ3、在图示得齿轮--连杆组合机构中,试用瞬心法求齿轮 1 与 3 得传动比 ω1/ω2
4、在图示得四杆机构中,=60 mm, =90m m, ==1 2 0 mm, =1 0ra d/s,试用瞬心法求:(1)当=1 6 5°时,点 C 得速度;(2)当=16 5°时,构件 3 得 BC 线上速度最小得一点 E 得位置及其速度得大小;(3)当时,角之值(有两个解)
5、如图为一速度多边形,请标出矢量、、及矢量、、得