一、单选题 1
(5 分) A
得分: 5 知识点: 3
4 高阶系统的动态响应 展开解析 答案 B 解析 2
(5 分) A
某系统闭环传递函数为,其中对应的留数最小的闭环极点是( )
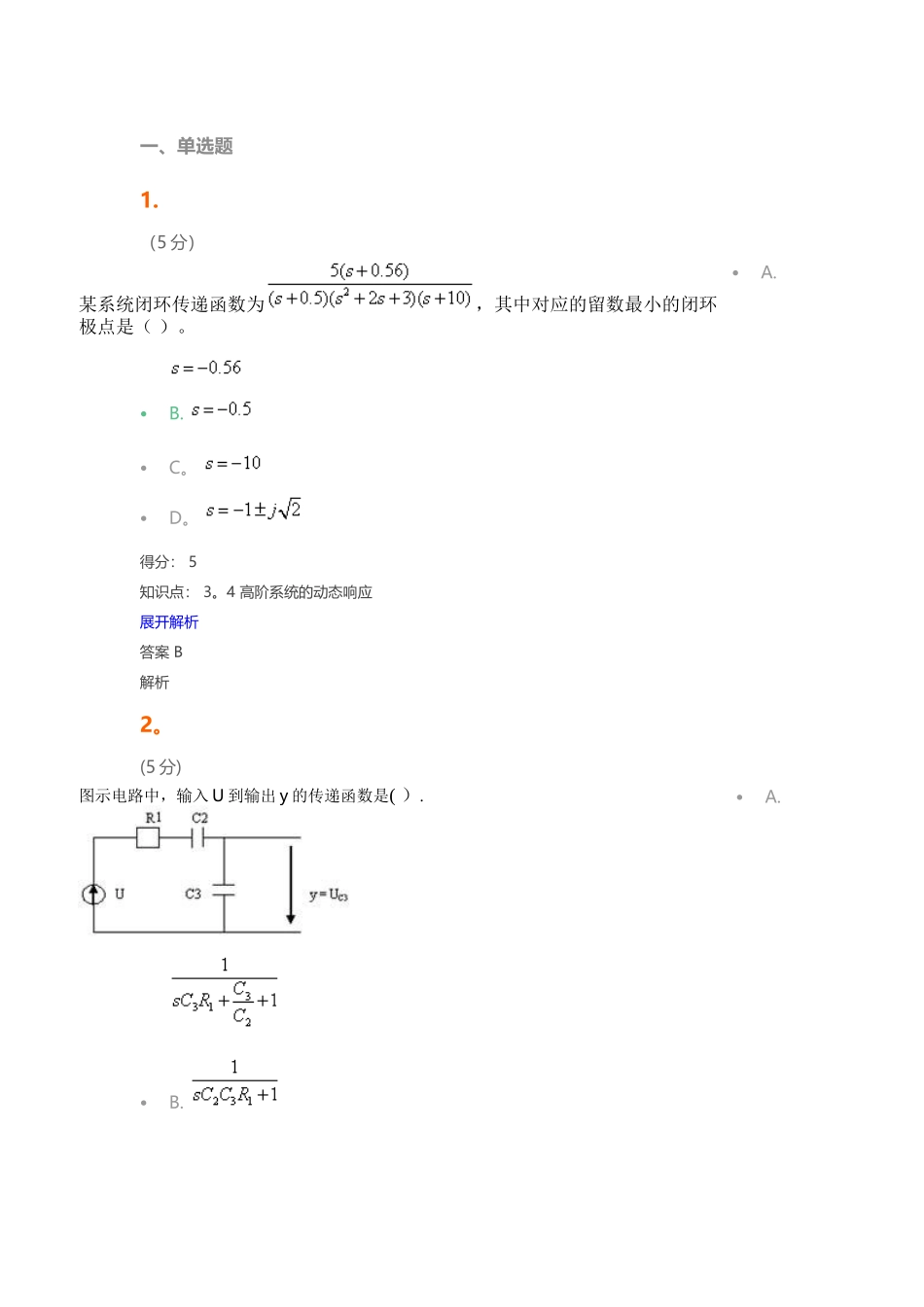
图示电路中,输入 U 到输出 y 的传递函数是( )
得分: 0 知识点: 2
1 控制系统的微分方程 展开解析 答案 A 解析 3
(5 分) A
得分: 5 知识点: 2
3 传递函数动态结构图(方框图) 展开解析 答案 D 解析 4
(5 分) A
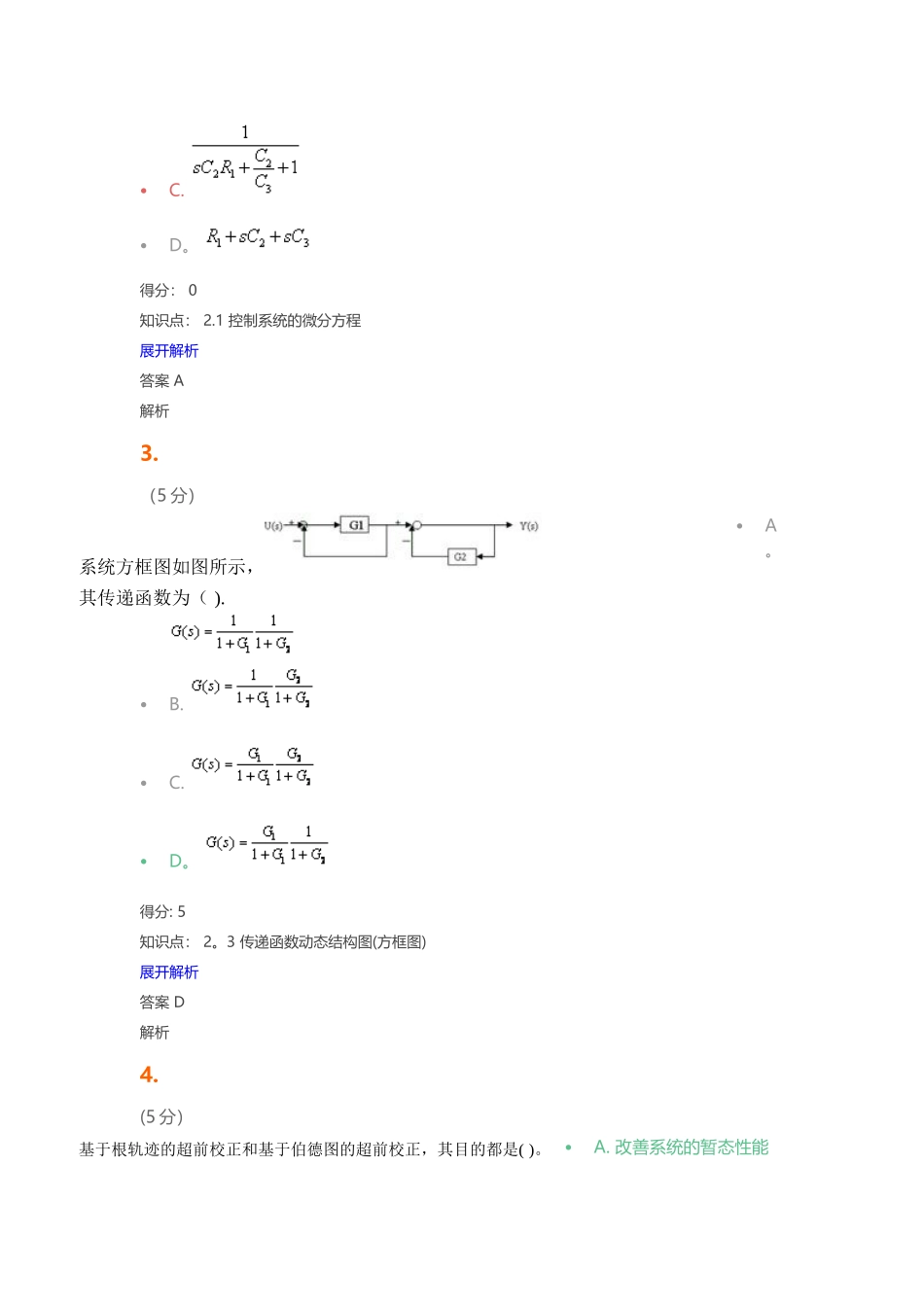
改善系统的暂态性能 系统方框图如图所示,其传递函数为( )
基于根轨迹的超前校正和基于伯德图的超前校正,其目的都是( )
将开环控制改为闭环控制 C
改善系统的稳态性能 D
用低阶系统近似代替高阶系统 得分: 5 知识点: 6
3 校正方法 展开解析 答案 A 解析 5
(5 分) A
稳定性 B
稳定性和稳态性 C
稳定性和快速性 D
稳态性能 得分: 5 知识点: 6
1 输出反馈系统的常用校正方式 展开解析 答案 D 解析 6
(5 分) A
位于第一象限的半圆 B
不规则曲线 D
位于第四象限的半圆 得分: 5 知识点: 5
2 频率特性 G (jω)的极坐标图(Nyuist 图) 展开解析 答案 B 解析 7
(5 分) 比例积分串联校正装置的主要作用是改善系统的( )
当 ω 从 −∞ → +∞ 变化时 惯性环节的极坐标图为一个( )
一个是写加号的一个是写减号的 B
一个是串联的一个是并联的 C
方框里写的东西不一样 D
一个是信号往回送的一个是信号向前走的 得分: 5 知识点: 2
3 传递函数动态结构图(方框图) 展开解析 答案 D 解析