伺服驱动系统设计方案伺服电机的原理:伺服的基本概念是准确、精确、快速定位
与普通电机一样,沟通伺服电机也由定子和转子构成
定子上有两个绕组,即励磁绕组和控制绕组,两个绕组在空间相差 90°电角度
伺服电机内部的转子是永磁铁,驱动控制的 u/V/W 三相电形成电磁场 转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度
伺服电机的精度决定于编码器的精度{线数)
伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出
其主要特点是,当信号电压为零时无自转现象转速随着转矩的增加而匀速下降作用:伺服电机,可使控制速度,位置精度非常准确
沟通伺服电机的工作原理和单相感应电动机无本质上的差异
但是,沟通伺服电机必须具备一个性能,就是能克服沟通伺服电机的所谓“自转”现象,即无控制信号时,它不应转动,特别是当它已在转动时,假如控制信号消逝,它应能立即停止转动
而普通的感应电动机转动起来以后,如控制信号消逝,往往仍在继续转动
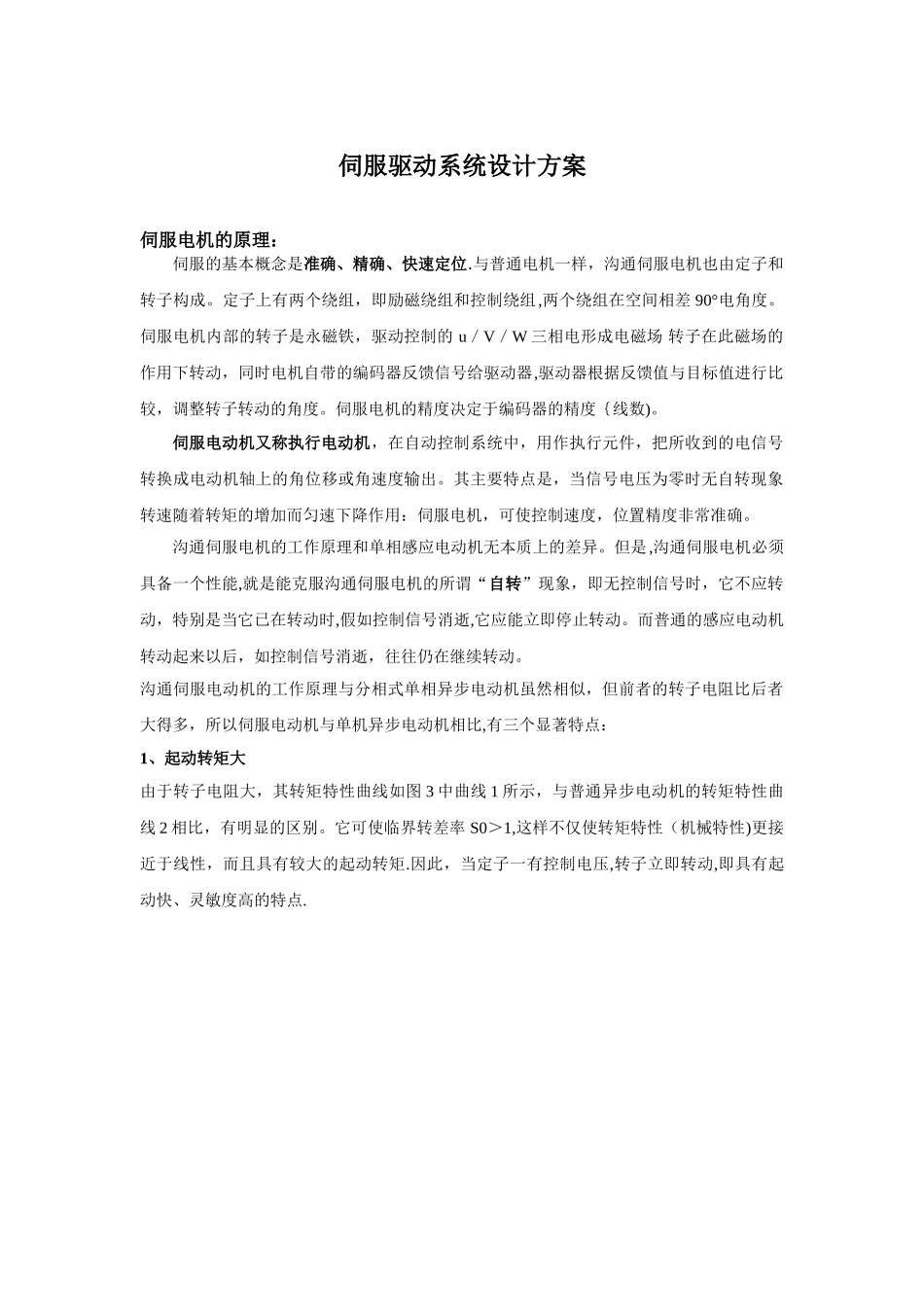
沟通伺服电动机的工作原理与分相式单相异步电动机虽然相似,但前者的转子电阻比后者大得多,所以伺服电动机与单机异步电动机相比,有三个显著特点:1、起动转矩大由于转子电阻大,其转矩特性曲线如图 3 中曲线 1 所示,与普通异步电动机的转矩特性曲线 2 相比,有明显的区别
它可使临界转差率 S0>1,这样不仅使转矩特性(机械特性)更接近于线性,而且具有较大的起动转矩
因此,当定子一有控制电压,转子立即转动,即具有起动快、灵敏度高的特点
图 3 伺服电动机的转矩特性2、运行范围较宽如图 3 所示,较差率 S 在 0 到 1 的范围内伺服电动机都能稳定运转
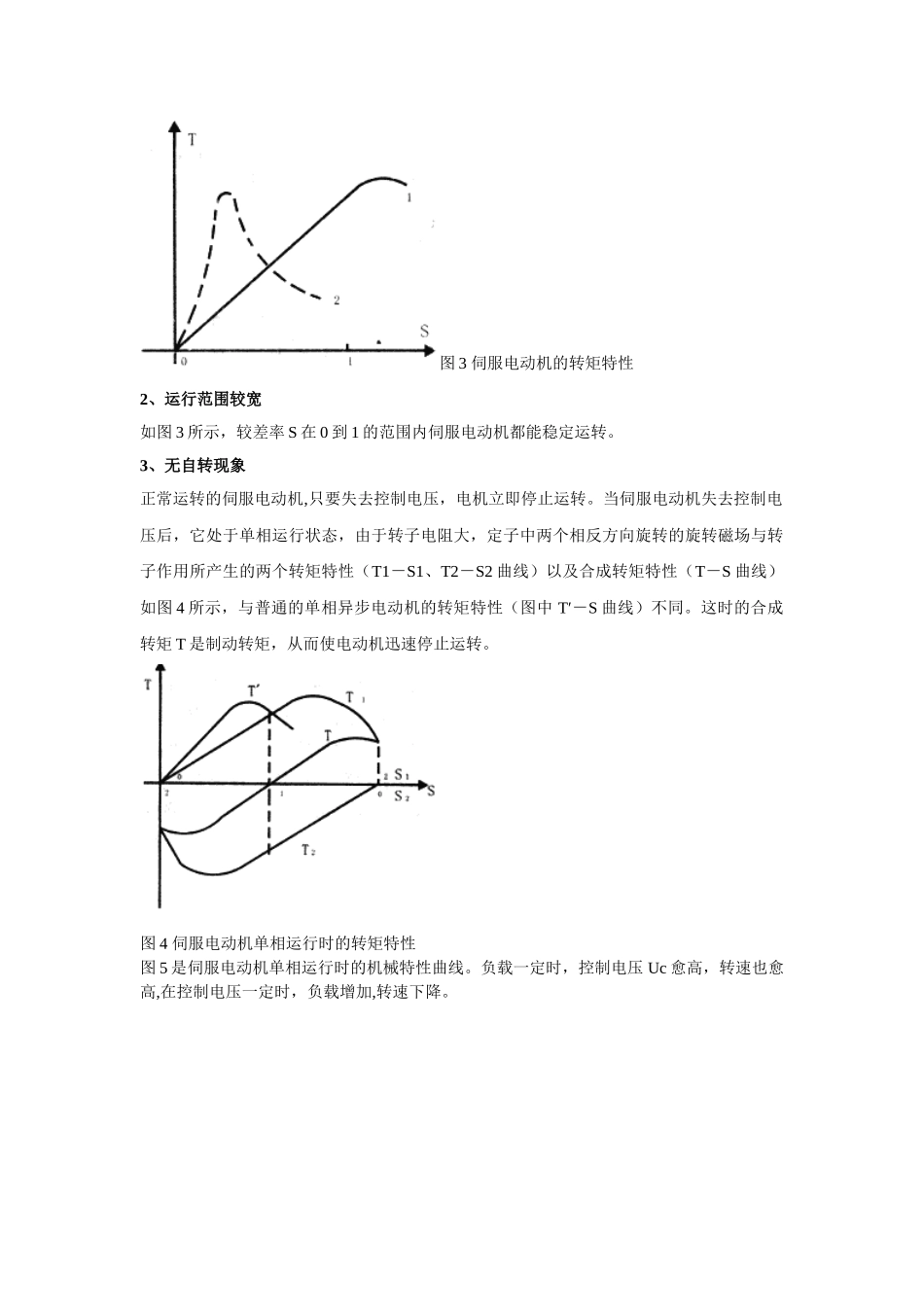
3、无自转现象正常运转的伺服电动机,只要失去控制电压,电机立即停止运转
当伺服电动机失去控制电压后,它处于单