无人机结构与系统无人机结构与系统机体坐标轴1机体坐标轴和基本运动状态飞机的运动状态是通过围绕飞机重心的三根互相垂直的轴,组成了飞机机体的坐标系即纵轴( X )、立轴( Y )和横轴( Z )
机体坐标轴和基本运动状态1
绕立轴( Y 轴)的转动称为偏航Y 轴立轴机体坐标轴和基本运动状态2
绕横轴( Z 轴)的转动称为俯仰Z轴横轴机体坐标轴和基本运动状态绕横轴( Z 轴)的转动称为俯仰机体坐标轴和基本运动状态3
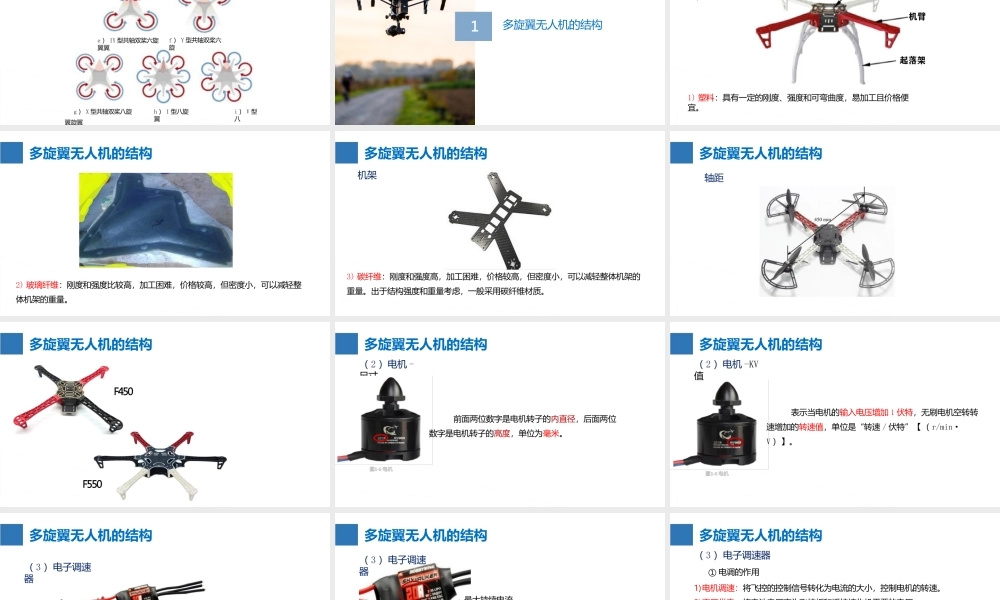
绕纵轴( X 轴)的转动称为滚转多旋翼无人机的结构2多旋翼无人机的结构a ) I 型四旋翼四旋翼b ) X型d )Xc ) I 型六旋翼型六旋翼多旋翼无人机的结构h ) I 型八旋翼g ) X 型共轴双桨八旋翼旋翼i ) V 型八f ) Y 型共轴双桨六旋e ) IY 型共轴双桨六旋翼翼多旋翼无人机的结构1多旋翼无人机的结构1) 塑料:具有一定的刚度、强度和可弯曲度,易加工且价格便宜
( 1 )机架多旋翼无人机的结构2) 玻璃纤维:刚度和强度比较高,加工困难,价格较高,但密度小,可以减轻整体机架的重量
多旋翼无人机的结构机架3) 碳纤维:刚度和强度高,加工困难,价格较高,但密度小,可以减轻整体机架的重量
出于结构强度和重量考虑,一般采用碳纤维材质
多旋翼无人机的结构轴距F550多旋翼无人机的结构F450多旋翼无人机的结构( 2 )电机 -尺寸前面两位数字是电机转子的内直径,后面两位数字是电机转子的高度,单位为毫米
多旋翼无人机的结构( 2 )电机 -KV值表示当电机的输入电压增加 1 伏特,无刷电机空转转 速增加的转速值,单位是“转速 / 伏特”【( r/min·V )】
多旋翼无人机的结构( 3 )电子调速器连接电池、飞行控制系统和电动机的部件
最大持续电流多旋翼无人机的结构( 3 )电子调速器电压范围多旋翼无人机的结构( 3 )电子调速器① 电调的作用1)电