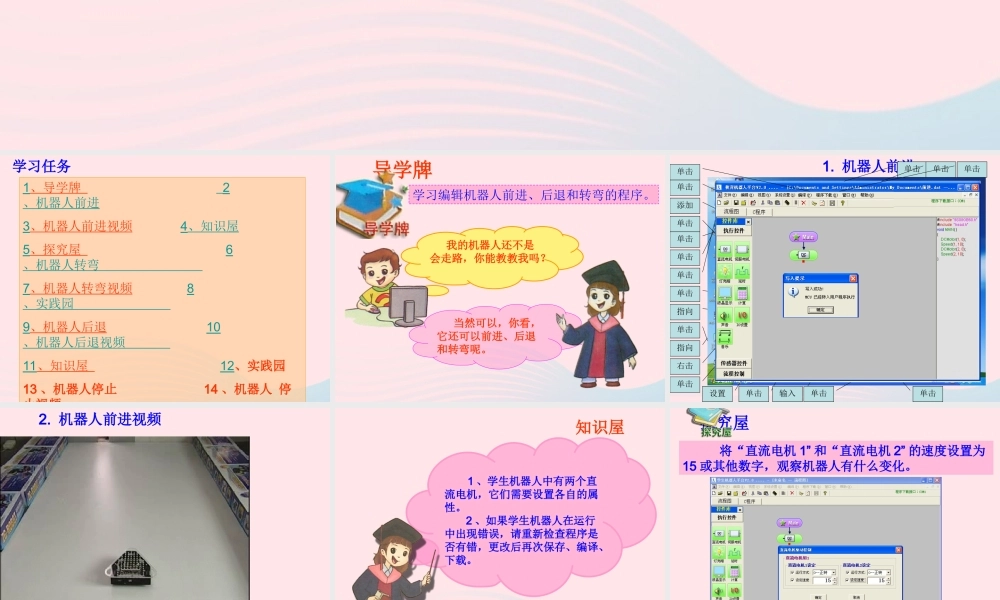
第 17 课 机器人行走学习任务1、导学牌 2、机器人前进3、机器人前进视频 4、知识屋5、探究屋 6、机器人转弯 7、机器人转弯视频 8、实践园 9、机器人后退 10、机器人后退视频 11、知识屋 12、实践园13 、机器人停止 14 、机器人 停止视频15 、讨论坊 16 、实践园17 、小结 18 、成果篮导学牌学习编辑机器人前进、后退和转弯的程序
当然可以,你看,它还可以前进、后退和转弯呢
我的机器人还不是 会走路,你能教教我吗
机器人前进单击指向指向单击单击单击单击单击添加右击单击设置单击单击输入单击单击单击单击单击单击2
机器人前进视频知识屋 1 、学生机器人中有两个直流电机,它们需要设置各自的属性
2 、如果学生机器人在运行中出现错误,请重新检查程序是否有错,更改后再次保存、编译、下载
探究屋 将“直流电机 1” 和“直流电机 2” 的速度设置为15 或其他数字,观察机器人有什么变化
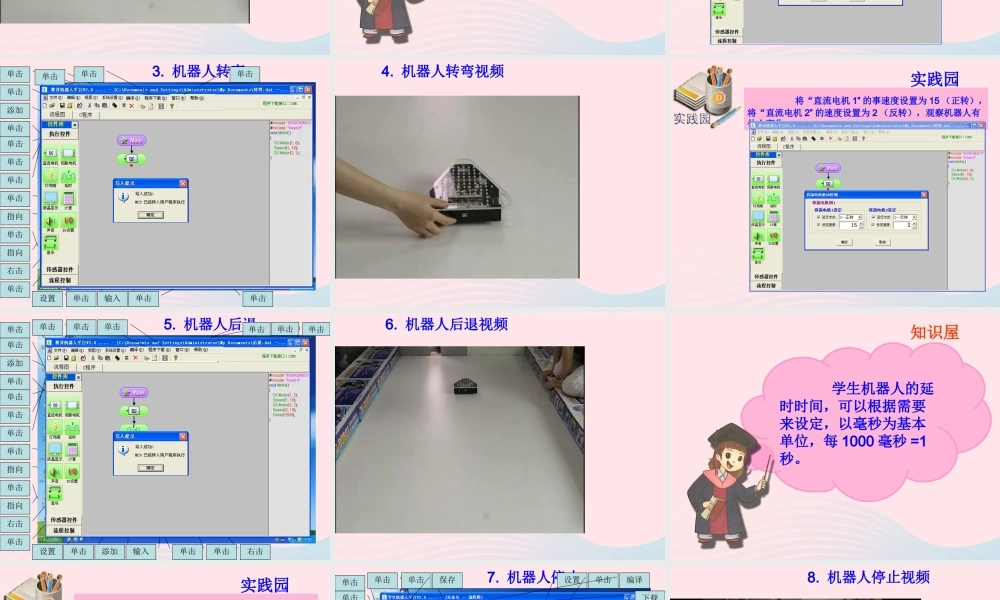
机器人转弯单击指向指向单击单击单击单击单击添加右击单击设置单击单击输入单击单击单击单击单击单击4
机器人转弯视频实践园 将“直流电机 1” 的事速度设置为 15 (正转),将“直流电机 2” 的速度设置为 2 (反转),观察机器人有什么变化
机器人后退单击指向指向单击单击单击单击单击添加右击单击设置单击单击添加右击单击单击单击输入单击单击单击单击单击单击6
机器人后退视频知识屋 学生机器人的延时时间,可以根据需要来设定,以毫秒为基本单位,每 1000 毫秒 =1秒
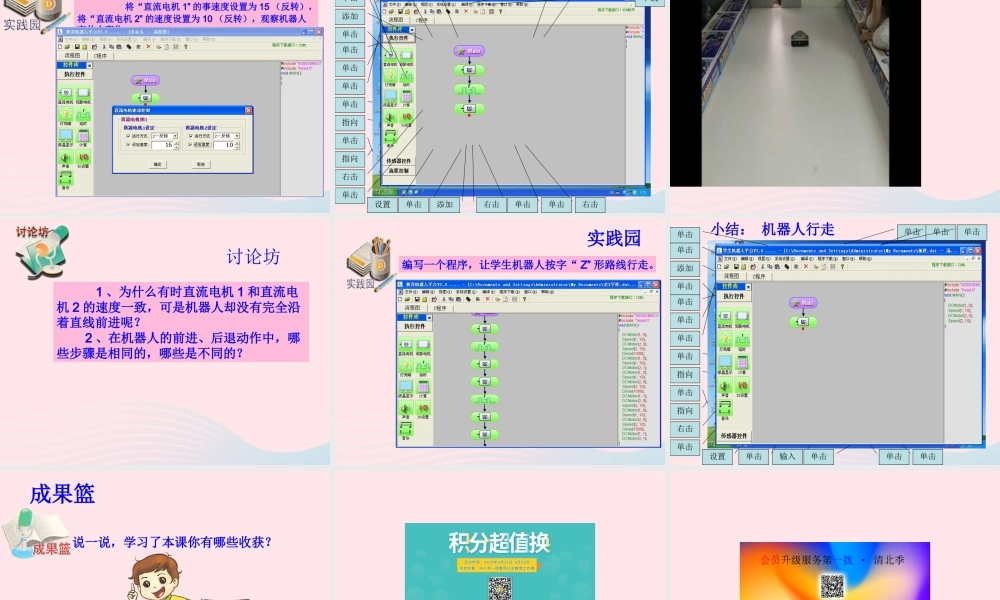
实践园 将“直流电机 1” 的事速度设置为 15 (反转),将“直流电机 2” 的速度设置为 10 (反转),观察机器人有什么变化
机器人停止单击指向指向单击单击单击单击单击添加右击单击设置单击单击添加右击单击单击单击单击右击单击设置单击保存编译下载8
机器人停止视频讨论坊 1 、