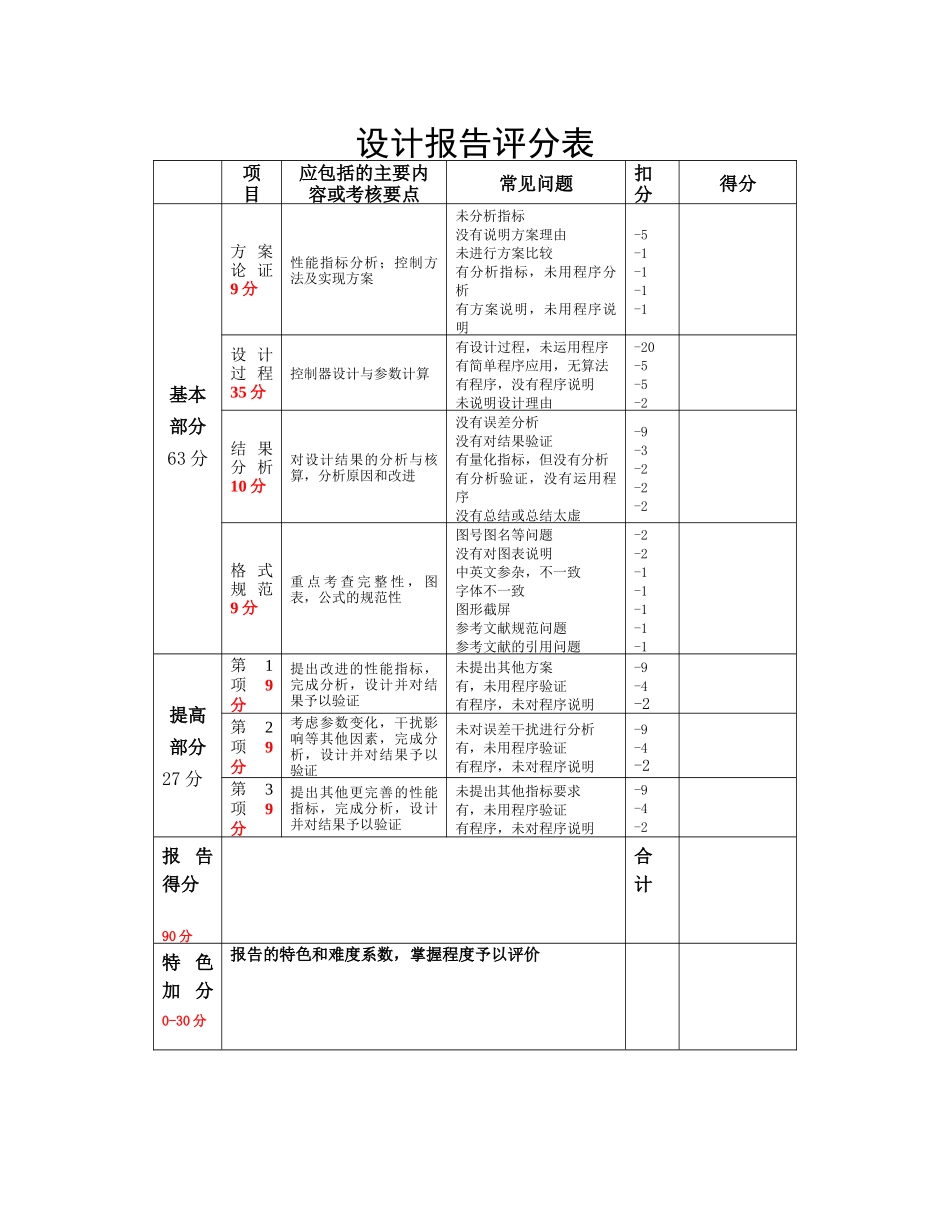
2008级《MATAB语言与控制系统仿真》课程大作业姓名赖智鹏学号u200811806所在院系电气与电子工程学院班级电气0809日期1月16日同组人员作业评分评阅人设计报告评分表项目应包括的主要内容或考核要点常见问题扣分得分基本部分63分方案论证9分性能指标分析;控制方法及实现方案未分析指标没有说明方案理由未进行方案比较有分析指标,未用程序分析有方案说明,未用程序说明-5-1-1-1-1设计过程35分控制器设计与参数计算有设计过程,未运用程序有简单程序应用,无算法有程序,没有程序说明未说明设计理由-20-5-5-2结果分析10分对设计结果的分析与核算,分析原因和改进没有误差分析没有对结果验证有量化指标,但没有分析有分析验证,没有运用程序没有总结或总结太虚-9-3-2-2-2格式规范9分重点考查完整性,图表,公式的规范性图号图名等问题没有对图表说明中英文参杂,不一致字体不一致图形截屏参考文献规范问题参考文献的引用问题-2-2-1-1-1-1-1提高部分27分第1项9分提出改进的性能指标,完成分析,设计并对结果予以验证未提出其他方案有,未用程序验证有程序,未对程序说明-9-4-2第2项9分考虑参数变化,干扰影响等其他因素,完成分析,设计并对结果予以验证未对误差干扰进行分析有,未用程序验证有程序,未对程序说明-9-4-2第3项9分提出其他更完善的性能指标,完成分析,设计并对结果予以验证未提出其他指标要求有,未用程序验证有程序,未对程序说明-9-4-2报告得分90分合计特色加分0-30分报告的特色和难度系数,掌握程度予以评价总分报告得分+答辩/特色加分PI控制器设计与讨论1
引言本文讨论的对象是智能交通/高速公路系统IVHS(习题7
3),系统通过电子技术为驾驶者和控制系统提供实时路面情况,该系统还提供更方便服务,驾驶者可不用自己操纵驾驶,而系统自动控制车辆,且保持车相对速度,以实