控制系统数字仿真与CAD实验指导书张晓华编哈尔滨工业大学电气工程系2006年3月1“双闭环控制直流电动机调速系统”数字仿真实验一、实验目的1
熟悉Matlab/Simulink仿真环境;2
掌握Simulink图形化建模方法;3
验证“直流电动机转速/电流双闭环PID控制方案”的有效性
二、实验内容1
“双闭环直流电动机调速系统”的建模2
电流环/调节器设计3
电流环动态跟随性能仿真实验4
转速环/调节器设计5
转速环动态抗扰性能仿真实验6
系统动态性能分析(给出仿真实验结果与理论分析结果的对比/分析/结论)三、实验步骤1、系统建模A.控制对象的建模建立线性系统动态数学模型的基本步骤如下:(1)根据系统中各环节的物理定律,列写描述据该环节动态过程的微分方程;(2)求出各环节的传递函数;(3)组成系统的动态结构图并求出系统的传递函数
下面分别建立双闭环调速系统各环节的微分方程和传递函数
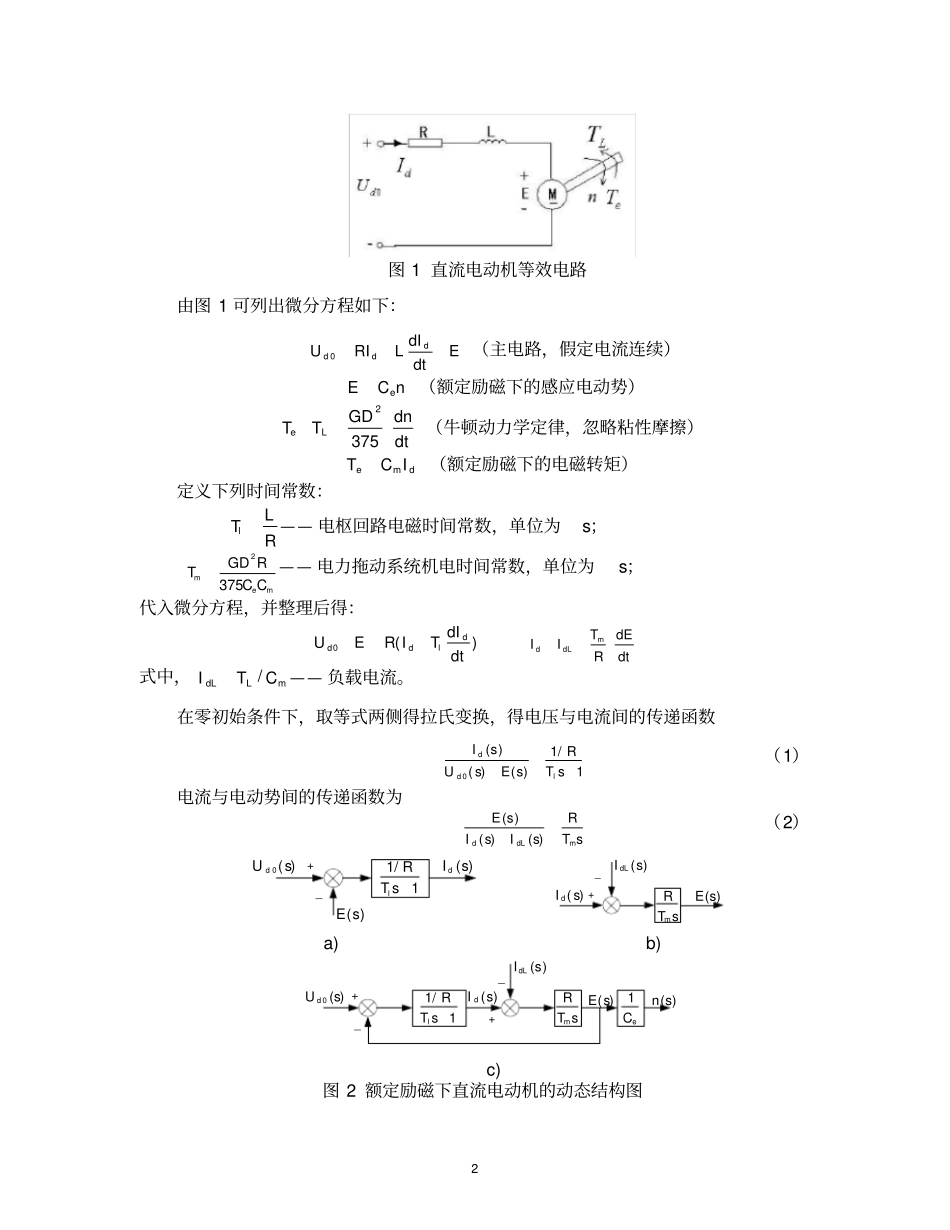
B.额定励磁下的直流电动机的动态数学模型图1给出了额定励磁下他励直流电机的等效电路,其中电枢回路电阻R和电感L包含整流装置内阻和平波电抗器电阻与电感在内,规定的正方向如图所示
2图1直流电动机等效电路由图1可列出微分方程如下:0ddddIURILEdt(主电路,假定电流连续)eECn(额定励磁下的感应电动势)2375eLGDdnTTdt(牛顿动力学定律,忽略粘性摩擦)emdTCI(额定励磁下的电磁转矩)定义下列时间常数:lLTR——电枢回路电磁时间常数,单位为s;2375memGDRTCC——电力拖动系统机电时间常数,单位为s;代入微分方程,并整理后得:0()dddldIUERITdtmddLTdEIIRdt式中,/dLLmITC——负载电流
在零初始条件下,取等式两侧得拉氏变换,得电压与电流间的传递函数0()1/()()1ddlIsRUsEsTs(1)电流与电动势间的传递函数为()()()d