1/7实验八控制系统设计系统根轨迹校正和仿真一、实验目的1、学习利用实验探索研究控制系统的方法;2、学会控制系统数学模型的建立及仿真;3、熟悉并掌握控制系统频域特性的分析;4、采用PID算法设计磁悬浮小球控制系统;5、了解PID控制规律和P、I、D参数对控制系统性能的影响;6、学会用Simulink来构造控制系统模型
二、实验设备(1)磁悬浮实验装置(2)计算机(3)软件要求:Matlab6
5以上版本软件,VC++6
0软件,板卡自带DeviceManager,PCL1711驱动程序,固高磁悬浮实时控制软件
三、实验原理3
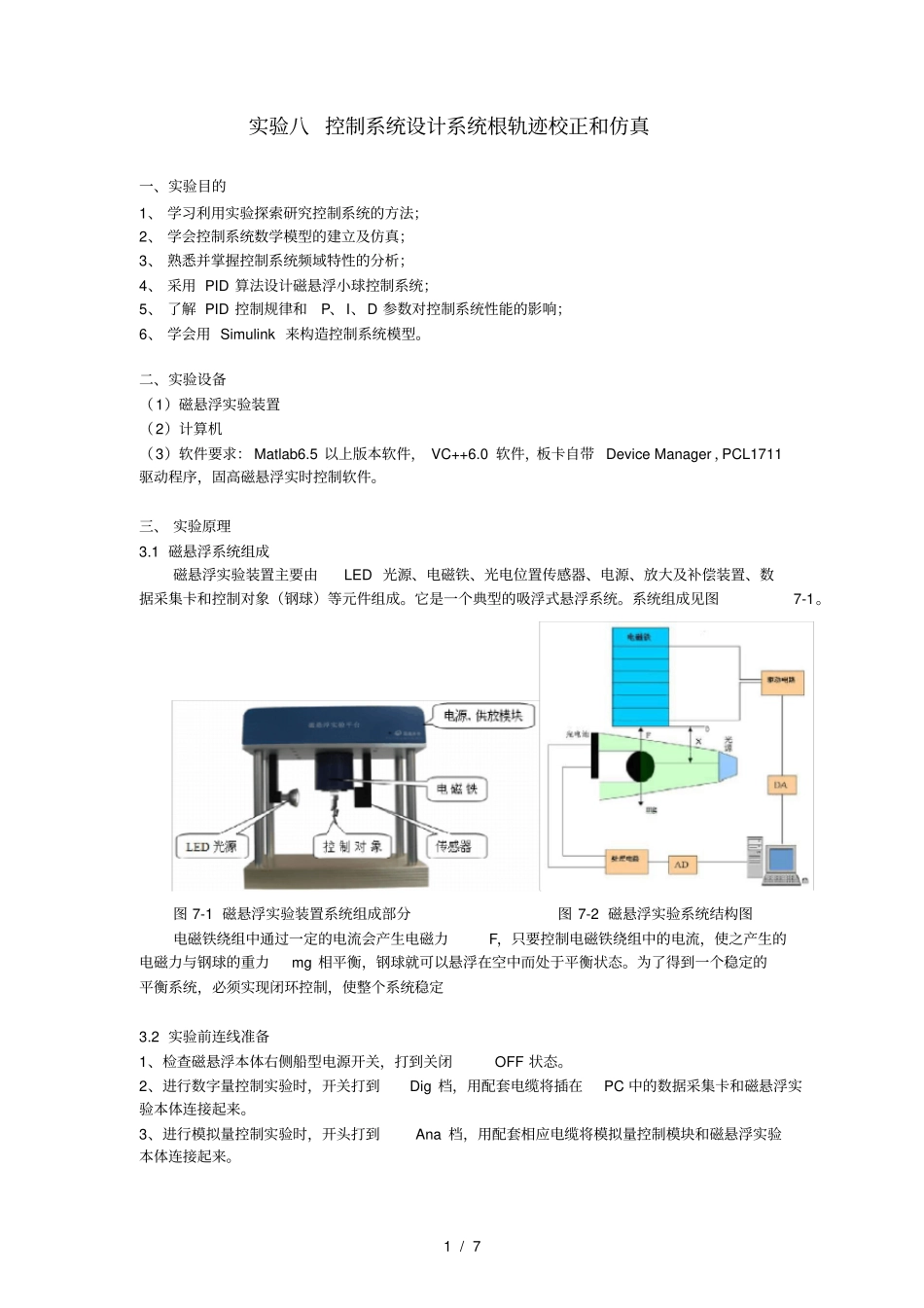
1磁悬浮系统组成磁悬浮实验装置主要由LED光源、电磁铁、光电位置传感器、电源、放大及补偿装置、数据采集卡和控制对象(钢球)等元件组成
它是一个典型的吸浮式悬浮系统
系统组成见图7-1
图7-1磁悬浮实验装置系统组成部分图7-2磁悬浮实验系统结构图电磁铁绕组中通过一定的电流会产生电磁力F,只要控制电磁铁绕组中的电流,使之产生的电磁力与钢球的重力mg相平衡,钢球就可以悬浮在空中而处于平衡状态
为了得到一个稳定的平衡系统,必须实现闭环控制,使整个系统稳定3
2实验前连线准备1、检查磁悬浮本体右侧船型电源开关,打到关闭OFF状态
2、进行数字量控制实验时,开关打到Dig档,用配套电缆将插在PC中的数据采集卡和磁悬浮实验本体连接起来
3、进行模拟量控制实验时,开头打到Ana档,用配套相应电缆将模拟量控制模块和磁悬浮实验本体连接起来
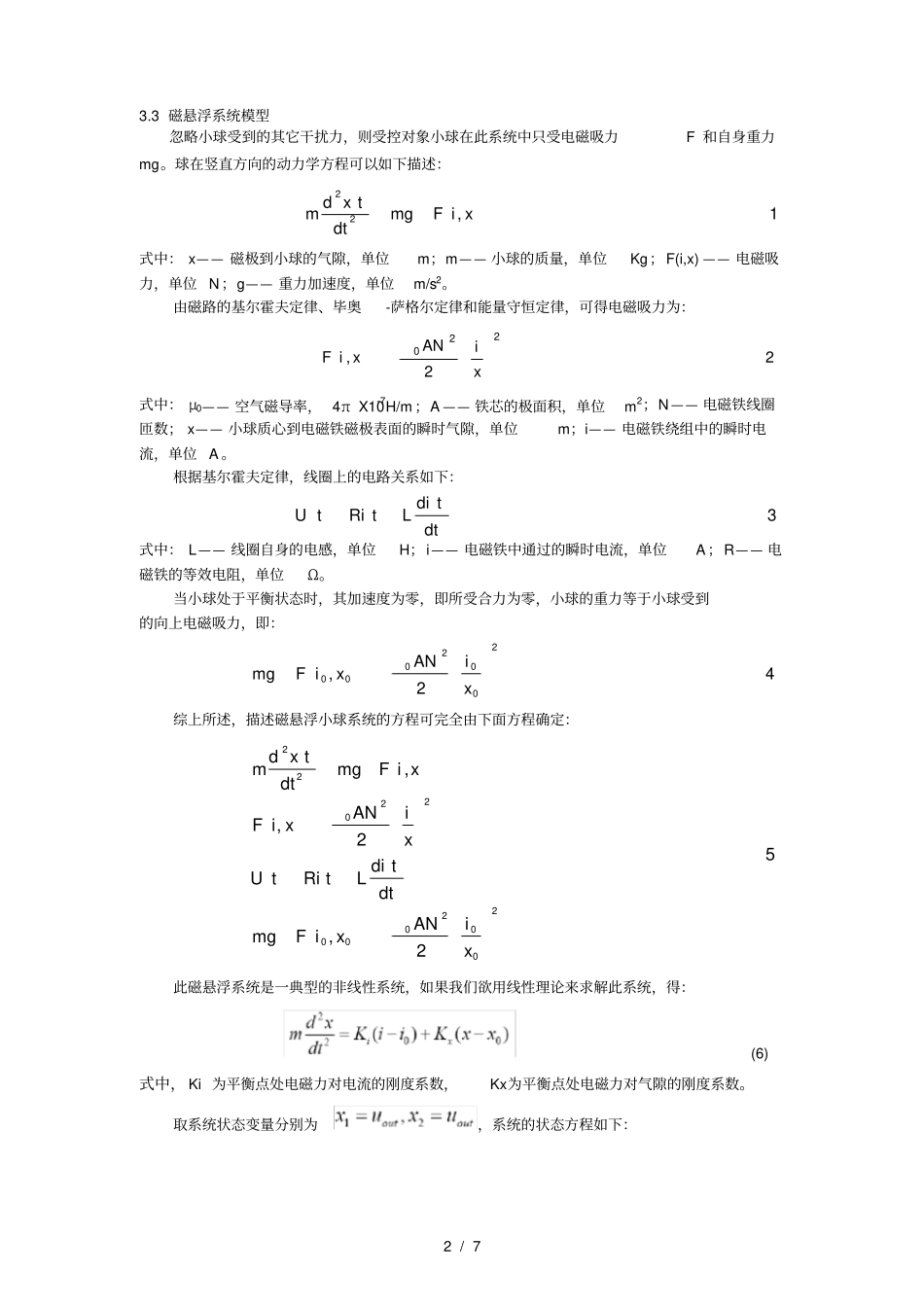
3磁悬浮系统模型忽略小球受到的其它干扰力,则受控对象小球在此系统中只受电磁吸力F和自身重力mg
球在竖直方向的动力学方程可以如下描述:1,22xiFmgdttxdm式中:x——磁极到小球的气隙,单位m;m——小球的质量,单位Kg;F(i,x)——电磁吸力,单位N;g——重力加速度,单位m/s2
由磁路的基尔霍夫定律、毕奥-萨