数字PID及其算法主要内容:1、PID算法的原理及数字实现2、数字PID调节中的几个实际问题3、几种发展的PID算法4、PID参数的整定方法一、概述几个概念:1、程序控制:使被控量按照预先规定的时间函数变化所作的控制,被控量是时间的函数
2、顺序控制:是指控制系统根据预先规定的控制要求,按照各个输入信号的条件,使过程的各个执行机构自动地按预先规定的顺序动作
3、PID控制:调节器的输出是输入的比例、积分、微分的函数
4、直接数字控制:根据采样定理,先把被控对象的数学模型离散化,然后由计算机根据数学模型进行控制
5、最优控制:是一种使控制过程处在某种最优状态的控制
6、模糊控制:由于被控对象的不确定性,可采用模糊控制
二、PID算法的原理及数字实现PID调节的实质:根据系统输入的偏差,按照PID的函数关系进行运算,其结果用以控制输出
PID调节的特点:PID的函数中各项的物理意义清晰,调节灵活,便于程序化实现
三、PID算法的原理及数字实现PID调节器是一种线性调节器,他将设定值w与实际值y的偏差:按其比例、积分、微分通过线性组合构成控制量1、比例调节器:比例调节器的微分方程为:)(*yteKpy为调节器输出,Kp为比例系数,e(t)为调节器输入偏差
由上式可以看出比例调节的特点:调节器的输出与输入偏差成正比
只要偏差出现,就能及时地产生与之成比例的调节作用,使被控量朝着减小偏差的方向变化,具有调节及时的特点
但是,Kp过大会导致动态品质变坏,甚至使系统不稳定
比例调节器的阶跃响应特性曲线如下图ywesd*KsKipK对象we+-+++uy2、积分调节器:积分作用是指调节器的输出与输入偏差的积分成比例的作用,其作用是消除静差
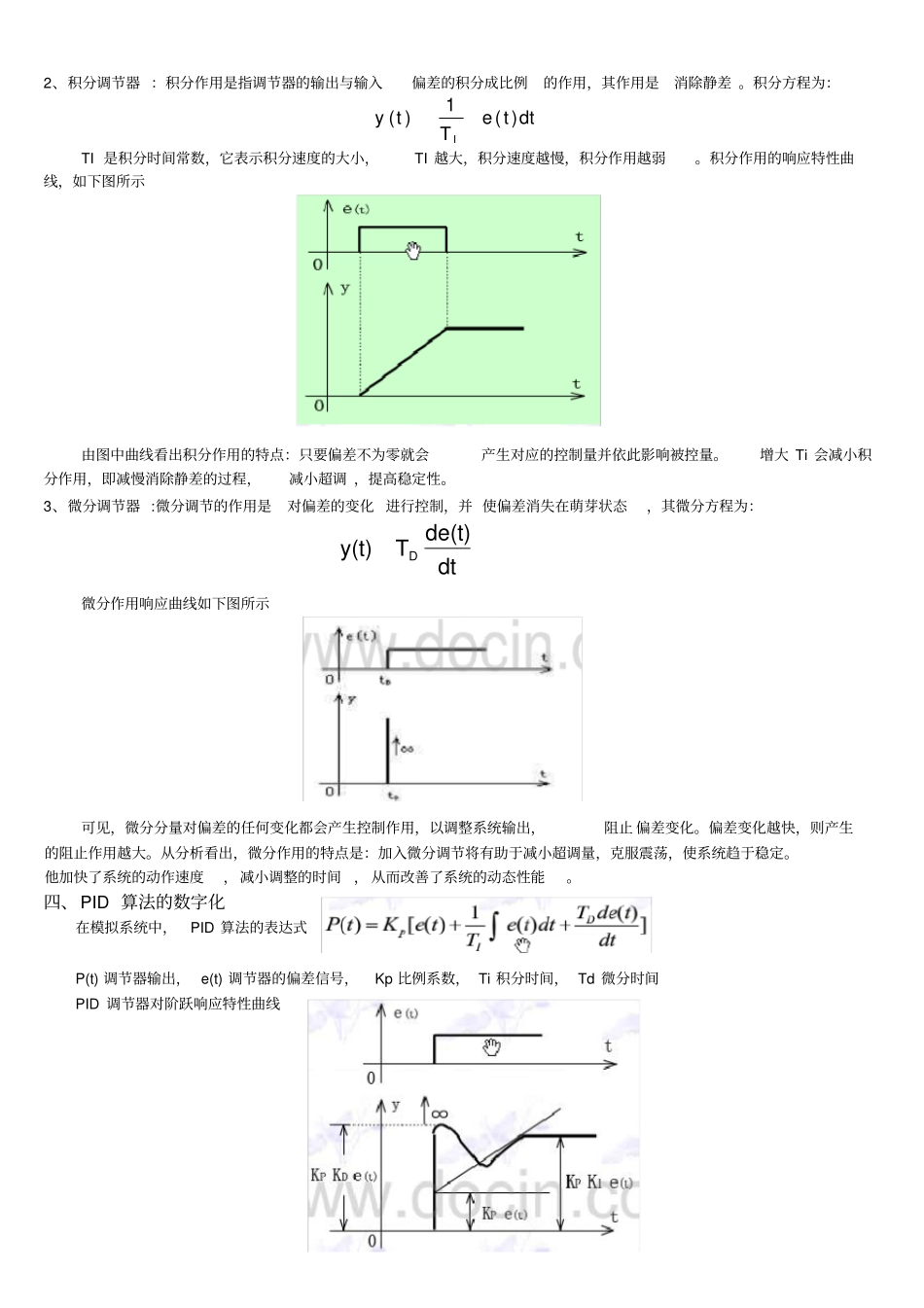
积分方程为:TI是积分时间常数,它表示积分速度的大小,TI越大,积分速度越慢,积分作用越弱
积分作用的响应特性曲线,如下图所示由图中曲线看出积分作用的特