双闭环直流调速系统的设计与仿真1、实验目的1
熟悉晶闸管直流调速系统的组成及其基本原理
掌握晶闸管直流调速系统参数及反馈环节测定方法
掌握调节器的工程设计及仿真方法
2、实验内容1
调节器的工程设计2
仿真模型建立3
系统仿真分析3、实验要求用电机参数建立相应仿真模型进行仿真4、双闭环直流调速系统组成及工作原理晶闸管直流调速系统由三相调压器,晶闸管整流调速装置,平波电抗器,电动机一发电机组等组成
本实验中,整流装置的主电路为三相桥式电路,控制回路可直接由给定电压Uct作为触发器的移相控制电压,改变Uct的大小即可改变控制角,从而获得可调的直流电压和转速,以满足实验要求
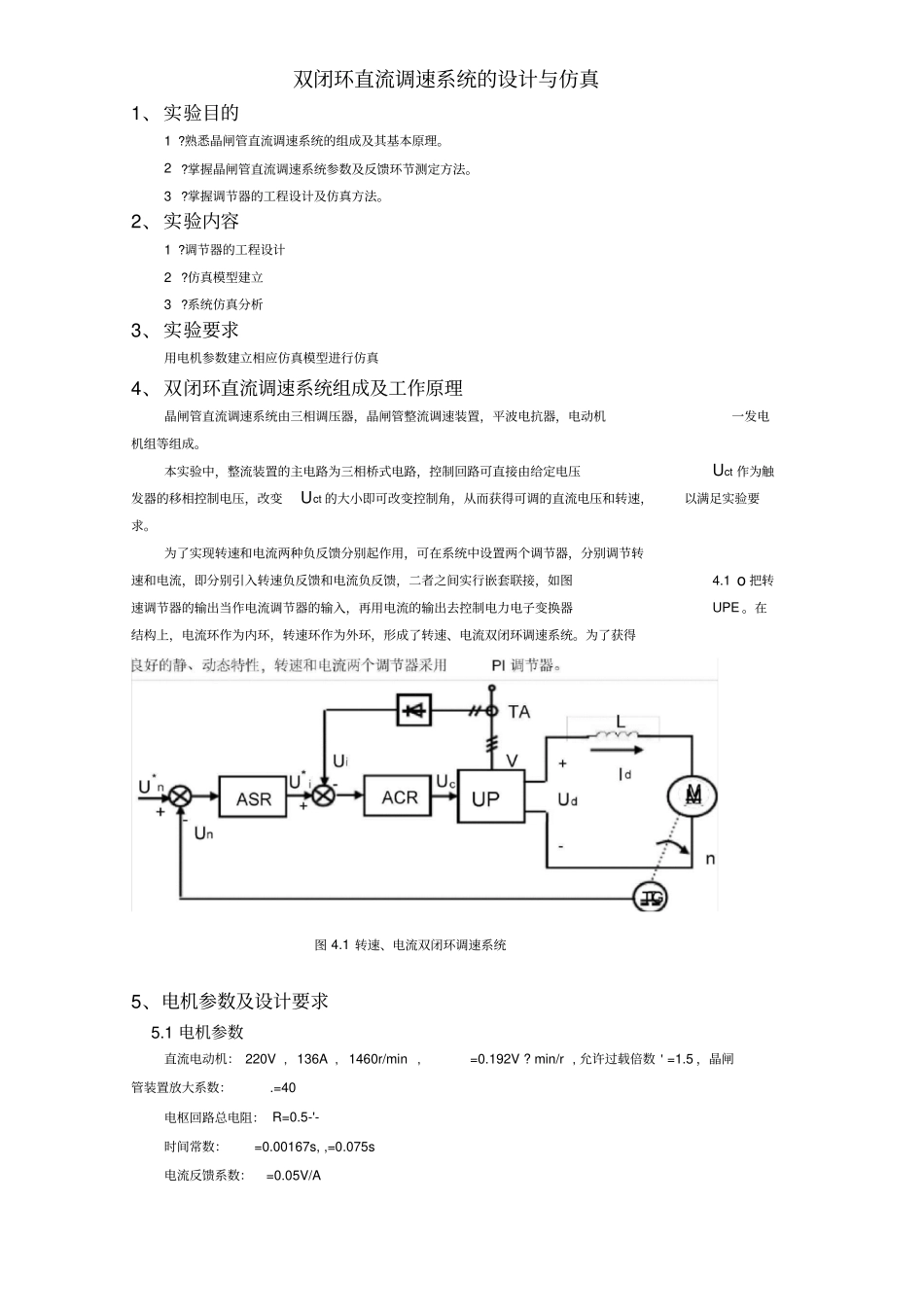
为了实现转速和电流两种负反馈分别起作用,可在系统中设置两个调节器,分别调节转速和电流,即分别引入转速负反馈和电流负反馈,二者之间实行嵌套联接,如图4
1o把转速调节器的输出当作电流调节器的输入,再用电流的输出去控制电力电子变换器UPE
在结构上,电流环作为内环,转速环作为外环,形成了转速、电流双闭环调速系统
为了获得图4
1转速、电流双闭环调速系统5、电机参数及设计要求5
1电机参数直流电动机:220V,136A,1460r/min,=0
min/r,允许过载倍数'=1
5,晶闸管装置放大系数:
=40电枢回路总电阻:R=0
5-'-时间常数:=0
00167s,,=0
075s电流反馈系数:=0
05V/A欢迎下载2转速反馈系数::=0
min/r5
2设计要求要求电流超调量5%,转速无静差,空载起动到额定转速时的转速超调量工
6调节器的工程设计6
1电流调节器ACR勺设计(1)确定电流环时间常数1)装置滞后时间常数,=0
0017s;2)电流滤波时间常数=0
002s;3)电流环小时间常数之和%萨+=0
0037s;(2)选择电流调节结构根据