第二章机器人设计(2)活动项目四沿墙走机器人中小学通用技术课程配套教材第四册课前准备学习目标1.掌握两个超声波传感器的组合编程使用;2.按照辅助教材的拼装步骤搭建一个沿墙走机器人的模型;3.懂得依据所搭建的沿墙走机器人编写一个使其能沿着“墙壁”走的程序
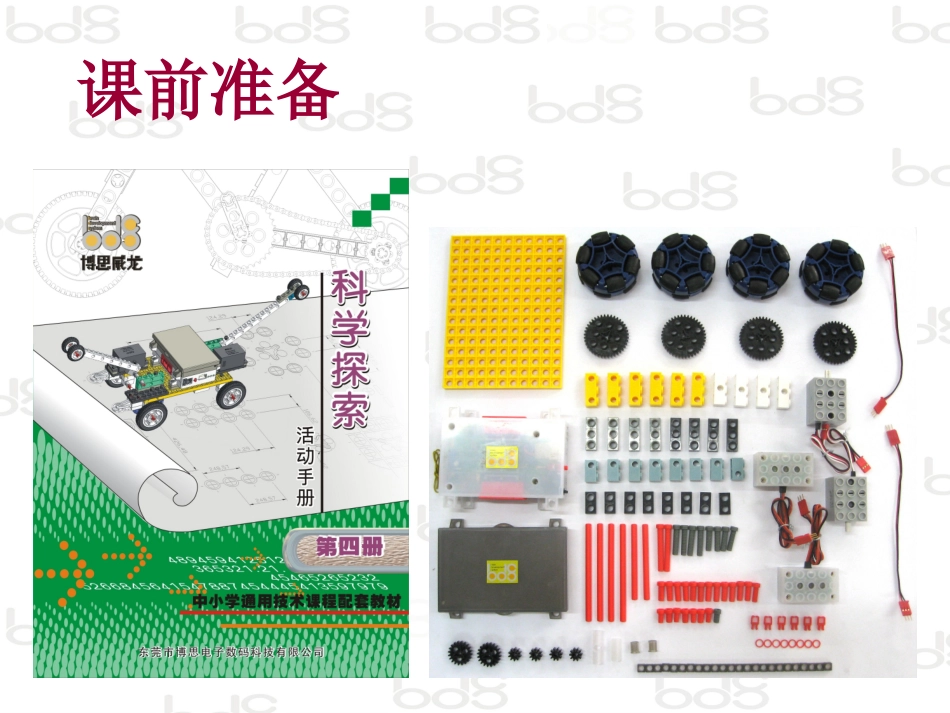
项目实践让我们参照≤科学探索≥第四册课本61—65页的拼装步骤搭建一个沿墙走机器人的模型
项目实践电子元件的接线示意图超声波传感器2连接信号通道11超声波传感器1连接信号通道10马达1连接马达通道1马达2连接马达通道2项目实践现在我们依据之前搭建的沿墙走机器人编写一个能使它沿着下面图示的“墙壁”行走的程序
墙壁编写程序前,我们要先绘制一个程序流程图,这样会使得我们编写程序时错误更少、效率更高
项目实践开始输入变量sonar_1输入变量sonar_2条件循环sonar_2>20YN延时等待右前方前进条件判断sonar_1<10左前方前进输入变量sonar_1输入变量sonar_2停止YN结束现在我们开始编写程序项目实践项目实践现在看看同学们自己制作的沿墙走机器人能否像下面这个视频里的沿墙走机器人那样运行
项目思考如果把沿墙走机器人上面的两个超声波传感器换成两个行程开关,通过修改程序的方式能不能使机器人可以跟以前一样沿着墙壁行走
能的话应该怎样修改