河北联合大学电气工程学院生产实习报告专业自动化姓名—张桂平学号指导教师—沈小伟2013年7月1日时间2013
17-2013
1地点河北联合大学电工电子实验基地实习目的」与内容本课题是基于AT89C52单片机的智能小车的设计与实现,小车完成的主要功能是能够自主识别黑色引导线并根据黑线走向实现快速稳定的寻线行驶
小车系统以AT89S52单片机为系统控制处理器;采用红外传感获取赛道的信息,来对小车的方向和速度进行控制
此外,对整个控制软件进设计和程序的编制以及程序的调试,并最终完成软件和硬件的融合实现小车的预期功能
通过对基于ARMLPC2000系列单片机的智能寻迹小车的设计与控制实训,除了加深和巩固学生课程理论学习之外,更重要的是加强实践、拓展应用,让学生了解基于ARMLPC2000系列单片机的开发和运用的一个整体开发流程,包括在训练中要求学生能够自己根据性能指标和功能要求掌握硬件电路的设计和制作、元器件的选用和安装、软件的编写和调试,同时学会硬件仿真、软件仿真和整机联调,其中最关键的两部分:硬件电路设计与制作和控制软件的编写以及调试,使得准产品最后达到技术指标的要求二实习内容本报告主要分为三个部分
第一部分是对整个系统实现方法的一个概要说明,主要内容是对整个技术原理的概述;第二部分是对硬件电路设计的说明,主要介绍系统传感器的设计及其他硬件电路的设计原理等;第三部分是对系统软件设计部分的说明,主要内容是智能模型车设计中主要用到的控制理论、算法说明及代码设计介绍等
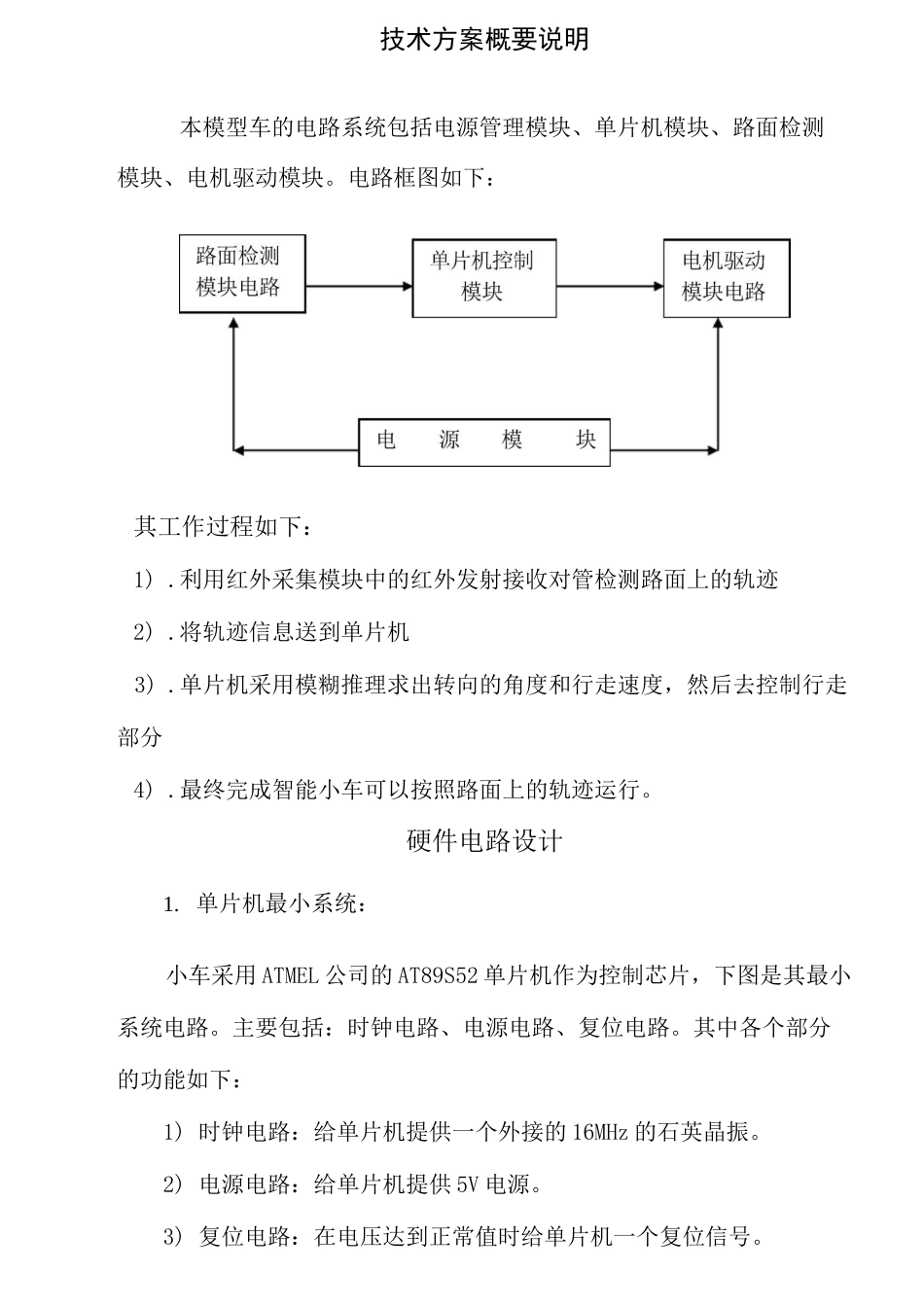
技术方案概要说明本模型车的电路系统包括电源管理模块、单片机模块、路面检测模块、电机驱动模块
电路框图如下:其工作过程如下:1)
利用红外采集模块中的红外发射接收对管检测路面上的轨迹2)
将轨迹信息送到单片机3)
单片机采用模糊推理求出转向的角度和行走速度,然后去控制行走部分4)
最终完成智能小车可以按照路面上