第三章反馈控制系统的特性CollegeofAutomaticControlEngineeringCUIT第三章反馈控制系统的特性FeedbackControlSystemCharacteristics本章主要内容本章主要内容反馈控制系统误差信号分析控制系统对参数变化的灵敏度反馈系统中的干扰和噪声稳态误差计算机仿真分析工程应用本章目标深刻认识误差在系统分析中的重要地位充分理解反馈对消除干扰、噪声和参数变化对系统影响的作用理解系统对动态响应和静态响应控制的区别明白反馈的作用和代价参阅教材第4章P151--179第三章反馈控制系统的特性CollegeofAutomaticControlEngineeringCUIT3
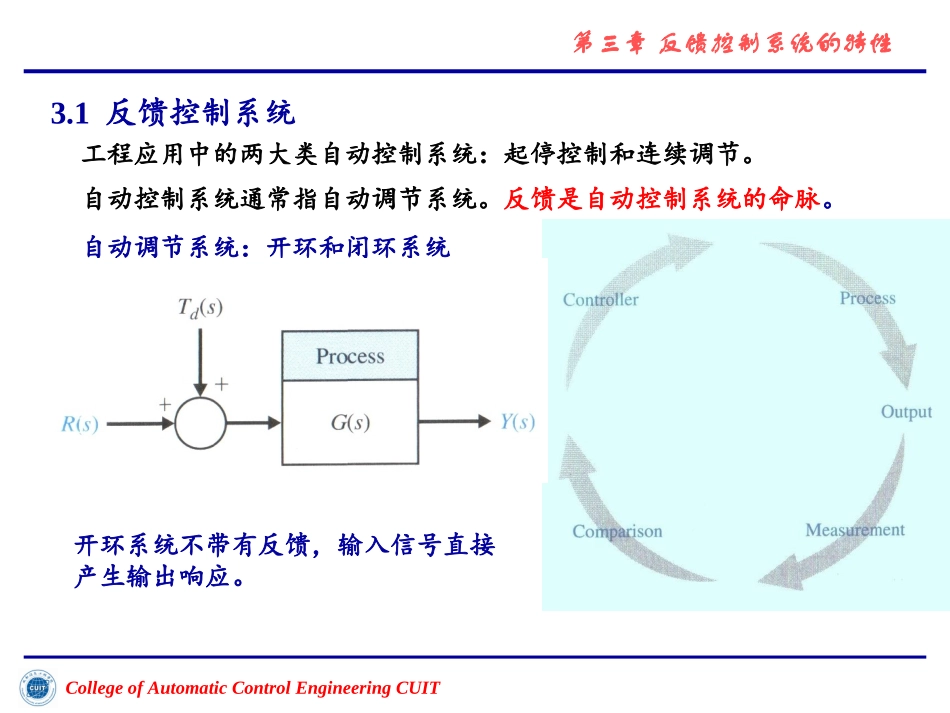
1反馈控制系统工程应用中的两大类自动控制系统:起停控制和连续调节
自动控制系统通常指自动调节系统
反馈是自动控制系统的命脉
自动调节系统:开环和闭环系统开环系统不带有反馈,输入信号直接产生输出响应
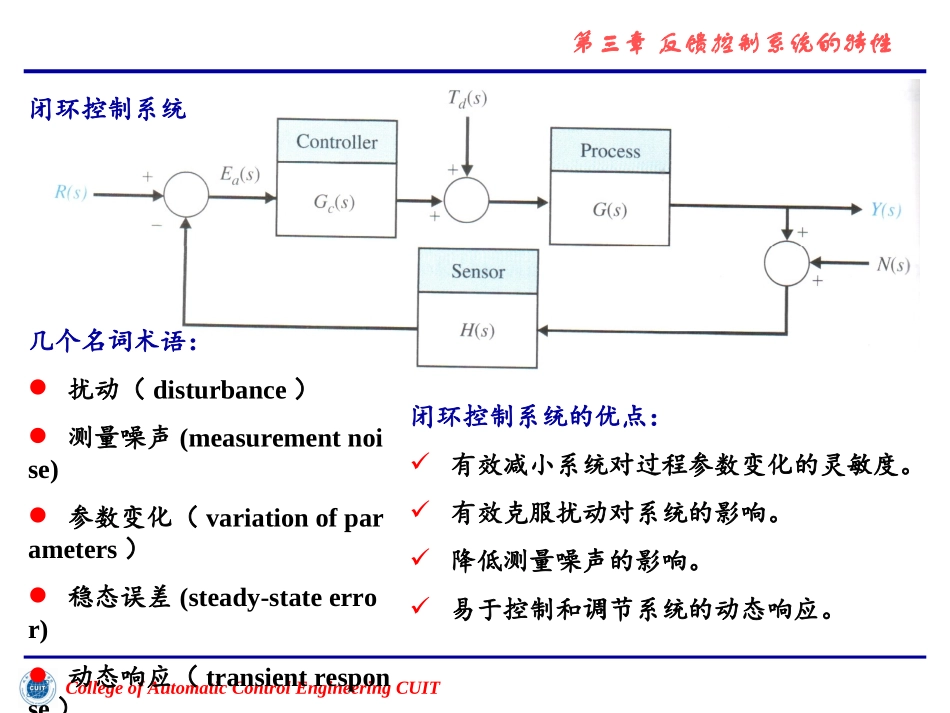
第三章反馈控制系统的特性CollegeofAutomaticControlEngineeringCUIT闭环控制系统闭环控制系统的优点:有效减小系统对过程参数变化的灵敏度
有效克服扰动对系统的影响
降低测量噪声的影响
易于控制和调节系统的动态响应
几个名词术语:扰动(disturbance)测量噪声(measurementnoise)参数变化(variationofparameters)稳态误差(steady-stateerror)动态响应(transientresponse)第三章反馈控制系统的特性CollegeofAutomaticControlEngineeringCUIT3
2误差信号分析一、误差信号定义)()()(sYsRsE也称为跟踪误差(trackingerror)假定H(s)=1,单位反馈
则E(s)=Ea(s)